自监督去噪:Noise2Noise原理及实现(Pytorch)
文章地址:https://arxiv.org/abs/1803.04189
ICML github 代码: https://github.com/NVlabs/noise2noise
本文整理和参考代码: https://github.com/shivamsaboo17/Deep-Restore-PyTorch
文章目录
- 1. 理论背景
- 2. 实验结果
- 3. 代码实现
- (1) 网络结构
- (2) 数据加载
- (3) 网络训练
- (4) 完整流程
- 4. 总结
文章核心句子: ‘learn to turn bad images into good images by only looking at bad images, and do this just as well, sometimes even better.’
1. 理论背景
如果有一系列观测不怎么精确的数据(y1,y2…yn),想要得到一个可信的结果最简单的方法就是让这些观测数据的 “方差”(可以是其他度量)最小
a r g m i n z E y { L ( z , y ) } \underset{z}{argmin} E_y \{ L(z,y)\} zargminEy{L(z,y)}
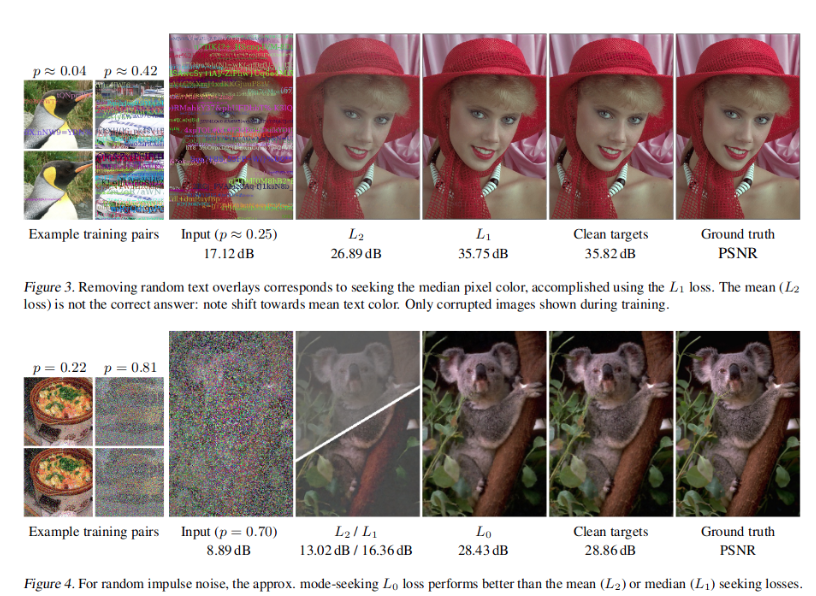
不同的损失函数这里查找的最优位置不同:
- L2 损失, L ( z , y ) = ( z − y ) 2 L(z,y) = (z-y)^2 L(z,y)=(z−y)2的时候,最优位置是期望
z = E y { y } z = E_y \{ y\} z=Ey{y} - L1 损失, L ( z , y ) = ∣ z − y ∣ L(z,y) = |z-y| L(z,y)=∣z−y∣,最优值就是中值位置 z = m e d i a n { y } z = median \{y \} z=median{y}
- L0损失, L ( z , y ) = ∣ z − y ∣ 0 L(z,y) = |z-y|_0 L(z,y)=∣z−y∣0, 最优值是众数, z = m o d e { y } z = mode\{ y\} z=mode{y}
将这里的z用网络进行表示
a r g m i n θ E ( x , y ) { L ( f θ ( x ) ) , y } \underset{\theta}{argmin} E_{(x,y)} \{ L(f_{\theta}(x)),y \} θargminE(x,y){L(fθ(x)),y}
通过贝叶斯变换也等价于
a r g m i n θ E x { E y ∣ x { L ( f θ ( x ) , y ) } } \underset{\theta}{argmin} E_x \{ E_{y|x} \{ L(f_{\theta}(x), y)\} \} θargminEx{Ey∣x{L(fθ(x),y)}}
理论上可通过优化每一个噪声图像对 ( x i , y i x_i,y_i xi,yi) 得到一个最好的拟合器 f θ f_{\theta} fθ ,但这是一个多解且不稳定的过程。比如对于一个超分辨问题来说,对于每一个输入的低分辨图像,其可能对应于多张高分辨图像,或者说多张高分辨图像的下采样可能对应同一张图像。而在高低分辨率的图像对上,使用L2损失函数训练网络,网络会学习到输出所有结果的平均值。这也是我们想要的,如果网络经过优化之后,输出的结果不是和 x i x_i xi一一对应的,而是在一个范围内的随机值,该范围的期望是 y i y_i yi。
- 当网络还没有收敛的时候,其解空间大,方差大,得到的 y i y_i yi偏离真实结果很多
- 而充分训练的网络,解空间变小,方差小,得到的 y i y_i yi接近真实结果
- 解空间的大小不会随着训练的增加而无限减小,但其期望/均值总是不变的
那么上面的结论也就告诉我们,如果用一个期望和目标相匹配的随机数替换原始目标,那么其估计值是将保持不变的。也就是说如果输入条件目标分布 p ( y ∣ x ) p(y|x) p(y∣x)被具有相同条件期望值的任意分布替换,最佳网络参数是保持不变的。训练的目标表示为
a r g m i n θ ∑ i L ( f θ ( x i ^ ) , y i ^ ) \underset{\theta}{argmin} \sum_i L(f_{\theta}(\hat{x_i}),\hat{y_i}) θargmini∑L(fθ(xi^),yi^)
其中,输出和目标都是来自于有噪声的分布,其满足 E { y i ^ ∣ x i ^ } = y i E\{ \hat{y_i} | \hat{x_i} \} = y_i E{yi^∣xi^}=yi
当给定的训练数据足够多的时候,该目标函数的解和原目标函数是相同的.当训练数据有限的时候,估计的均方误差等于目标中的噪声平方差除以训练样例数目
E y ^ [ 1 N ∑ i y i − 1 N ∑ i y i ^ ] 2 = 1 N [ 1 N ∑ i v a r ( y i ) ] E_{\hat{y}} [\frac{1}{N} \sum_i y_i - \frac{1}{N} \sum_i \hat{y_i}]^2 = \frac{1}{N}[\frac{1}{N} \sum_i var(y_i)] Ey^[N1i∑yi−N1i∑yi^]2=N1[N1i∑var(yi)]
- 随着样本数量的增加,误差将接近于0。
- 即使数量有限,估计也是无偏的。
方法总结:
- 强行让NN学习两张 零均值噪声图片之间的映射关系
- 样本数量少:学习了两种零均值噪声的映射变换
- 样本数量多:噪声不可预测,需要最小化loss,NN倾向于输出所有可能的期望值,也就是干净图片
2. 实验结果
(1) 不同噪声:高斯噪声、poisson噪声、Bernoulli噪声
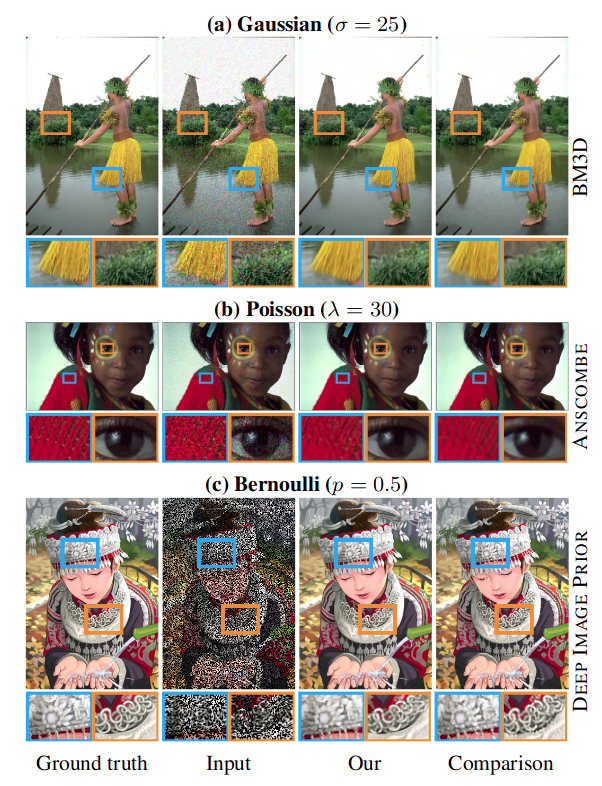
(2) 不同场景:图去文字、脉冲噪声
3. 代码实现
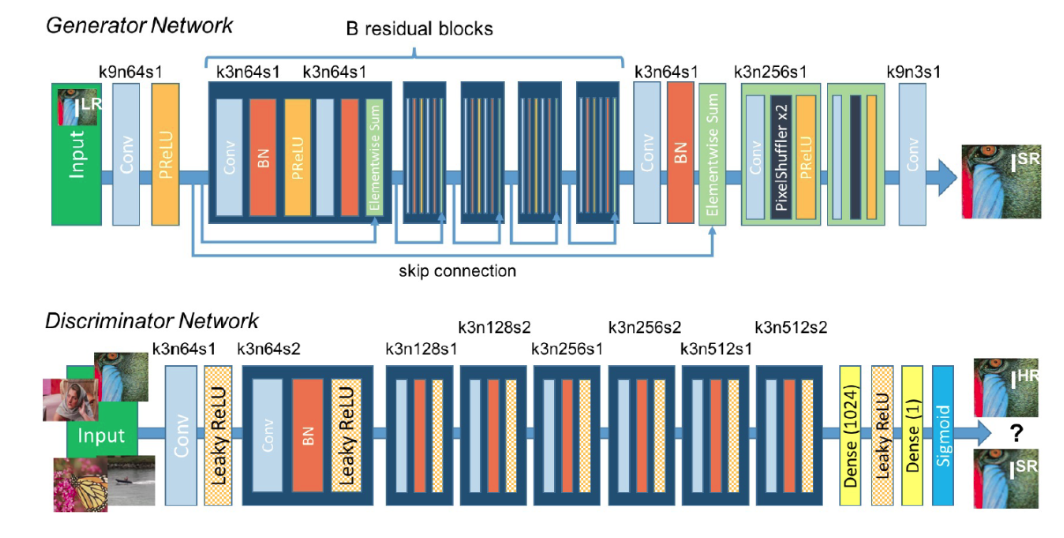
(1) 网络结构
SRResNet模型结构: SRGAN 图像超分辨率结构
import torch
import torch.nn as nn
import torch.nn.functional as Fclass ConvBlock(nn.Module):def __init__(self,input_channels,output_channels,kernel_size,stride=1,pad=1,use_act=True):super(ConvBlock,self).__init__()self.use_act = use_actself.conv = nn.Conv2d(input_channels,output_channels,kernel_size,stride=stride,padding=pad)self.bn = nn.BatchNorm2d(output_channels)self.act = nn.LeakyReLU(0.2,inplace=True)def forward(self,x):"""conv2dbatch normalizationPReLU"""op = self.bn(self.conv(x))if self.use_act:return self.act(op)else:return op class ResBlock(nn.Module):def __init__(self,input_channels,output_channels,kernel_size):super(ResBlock,self).__init__()self.block1 = ConvBlock(input_channels,output_channels,kernel_size)self.block2 = ConvBlock(input_channels,output_channels,kernel_size,use_act=False)def forward(self,x):"""conv2dBNPReLUconv2dBNelement sum (residule skip connection)"""return x + self.block2(self.block1(x))class SRResnet(nn.Module):def __init__(self,input_channels,output_channels,res_layers=16):super(SRResnet,self).__init__()self.conv1 = nn.Conv2d(input_channels,output_channels,kernel_size=3,stride=1,padding=1)self.act = nn.LeakyReLU(0.2,inplace=True)_resl = [ResBlock(output_channels,output_channels,3) for i in range(res_layers)]self.resl = nn.Sequential(*_resl)self.conv2 = ConvBlock(output_channels,output_channels,3,use_act=False)self.conv3 = nn.Conv2d(output_channels,input_channels,kernel_size=3,stride=1,padding=1)def forward(self,input):_op1 = self.act(self.conv1(input))_op2 = self.conv2(self.resl(_op1))op = self.conv3(torch.add(_op1,_op2))return opmodel = SRResnet(3,64)
model(2) 数据加载
这里用的数据是从 https://github.com/shivamsaboo17/Deep-Restore-PyTorch 下载的coco2017的数据,当然也可以从官网下载,然后将数据分为 train 和 valid两个部分。
这里准备的噪声数据有四种不同的方法,也是对应的文章中的内容
- gaussian
- poisson
- multiplicative_bernoulli
- text
from torch.utils.data import Dataset,DataLoader
import torchvision.transforms.functional as tvF
from PIL import Image,ImageFont,ImageDraw
from random import choice
from sys import platform
from random import choice
from string import ascii_letters
import numpy as np
import os
import scipy
import cv2
import random
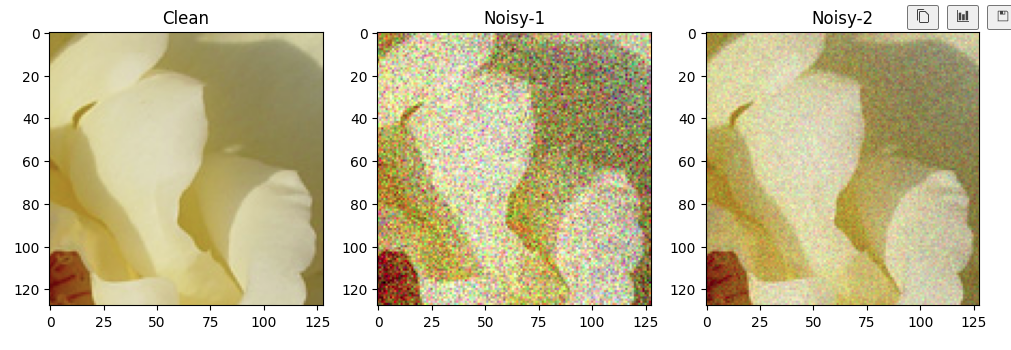
import matplotlib.pyplot as pltclass NoisyDataset(Dataset):def __init__(self, root_dir, crop_size=128, train_noise_model=('gaussian', 50), clean_targ=False):"""root_dir: Path of image directorycrop_size: Crop image to given sizeclean_targ: Use clean targets for training"""self.root_dir = root_dirself.crop_size = crop_sizeself.clean_targ = clean_targself.noise = train_noise_model[0]self.noise_param = train_noise_model[1]self.imgs = os.listdir(root_dir)def _random_crop_to_size(self, imgs):w, h = imgs[0].sizeassert w >= self.crop_size and h >= self.crop_size, 'Cannot be croppped. Invalid size'cropped_imgs = []i = np.random.randint(0, h - self.crop_size + 2)j = np.random.randint(0, w - self.crop_size + 2)for img in imgs:if min(w, h) < self.crop_size:img = tvF.resize(img, (self.crop_size, self.crop_size))cropped_imgs.append(tvF.crop(img, i, j, self.crop_size, self.crop_size))#cropped_imgs = cv2.resize(np.array(imgs[0]), (self.crop_size, self.crop_size))return cropped_imgsdef _add_gaussian_noise(self, image):"""Added only gaussian noise"""w, h = image.sizec = len(image.getbands())std = np.random.uniform(0, self.noise_param)_n = np.random.normal(0, std, (h, w, c))noisy_image = np.array(image) + _nnoisy_image = np.clip(noisy_image, 0, 255).astype(np.uint8)return {'image':Image.fromarray(noisy_image), 'mask': None, 'use_mask': False}def _add_poisson_noise(self, image):"""Added poisson Noise"""noise_mask = np.random.poisson(np.array(image))#print(noise_mask.dtype)#print(noise_mask)return {'image':noise_mask.astype(np.uint8), 'mask': None, 'use_mask': False}def _add_m_bernoulli_noise(self, image):"""Multiplicative bernoulli"""sz = np.array(image).shape[0]prob_ = random.uniform(0, self.noise_param)mask = np.random.choice([0, 1], size=(sz, sz), p=[prob_, 1 - prob_])mask = np.repeat(mask[:, :, np.newaxis], 3, axis=2)return {'image':np.multiply(image, mask).astype(np.uint8), 'mask':mask.astype(np.uint8), 'use_mask': True}def _add_text_overlay(self, image):"""Add text overlay to image"""assert self.noise_param < 1, 'Text parameter should be probability of occupancy'w, h = image.sizec = len(image.getbands())if platform == 'linux':serif = '/usr/share/fonts/truetype/dejavu/DejaVuSerif.ttf'else:serif = 'Times New Roman.ttf'text_img = image.copy()text_draw = ImageDraw.Draw(text_img)mask_img = Image.new('1', (w, h))mask_draw = ImageDraw.Draw(mask_img)max_occupancy = np.random.uniform(0, self.noise_param)def get_occupancy(x):y = np.array(x, np.uint8)return np.sum(y) / y.sizewhile 1:font = ImageFont.truetype(serif, np.random.randint(16, 21))length = np.random.randint(10, 25)chars = ''.join(choice(ascii_letters) for i in range(length))color = tuple(np.random.randint(0, 255, c))pos = (np.random.randint(0, w), np.random.randint(0, h))text_draw.text(pos, chars, color, font=font)# Update mask and check occupancymask_draw.text(pos, chars, 1, font=font)if get_occupancy(mask_img) > max_occupancy:breakreturn {'image':text_img, 'mask':None, 'use_mask': False}def corrupt_image(self, image):if self.noise == 'gaussian':return self._add_gaussian_noise(image)elif self.noise == 'poisson':return self._add_poisson_noise(image)elif self.noise == 'multiplicative_bernoulli':return self._add_m_bernoulli_noise(image)elif self.noise == 'text':return self._add_text_overlay(image)else:raise ValueError('No such image corruption supported')def __getitem__(self, index):"""Read a image, corrupt it and return it"""img_path = os.path.join(self.root_dir, self.imgs[index])image = Image.open(img_path).convert('RGB')# 对图片进行随机切割if self.crop_size > 0:image = self._random_crop_to_size([image])[0]# 噪声图片1source_img_dict = self.corrupt_image(image)source_img_dict['image'] = tvF.to_tensor(source_img_dict['image'])if source_img_dict['use_mask']:source_img_dict['mask'] = tvF.to_tensor(source_img_dict['mask'])# 噪声图片2if self.clean_targ:#print('clean target')target = tvF.to_tensor(image)else:#print('corrupt target')_target_dict = self.corrupt_image(image)target = tvF.to_tensor(_target_dict['image'])image = np.array(image).astype(np.uint8)if source_img_dict['use_mask']:return [source_img_dict['image'], source_img_dict['mask'], target,image]else:return [source_img_dict['image'], target, image]def __len__(self):return len(self.imgs)也可以对数据进行查看
data = NoisyDataset("./dataset/train/", crop_size=128) # Default gaussian noise without clean targets
dl = DataLoader(data, batch_size=1, shuffle=True)index = 10
[img_noise1,img_noise2,img] = data.__getitem__(index)plt.figure(figsize=(12,4))
plt.subplot(131)
plt.imshow(img)
plt.title("Clean")
plt.subplot(132)
plt.imshow(np.transpose(img_noise1,(1,2,0)))
plt.title("Noisy-1")
plt.subplot(133)
plt.imshow(np.transpose(img_noise2,(1,2,0)))
plt.title("Noisy-2")
plt.show()
(3) 网络训练
import torch
import torch.nn as nn
import torch.optim as optim
from torch.autograd import Variable
import torch.nn.functional as F
from torch.optim import lr_scheduler
from tqdm import tqdm
import matplotlib.pyplot as plt
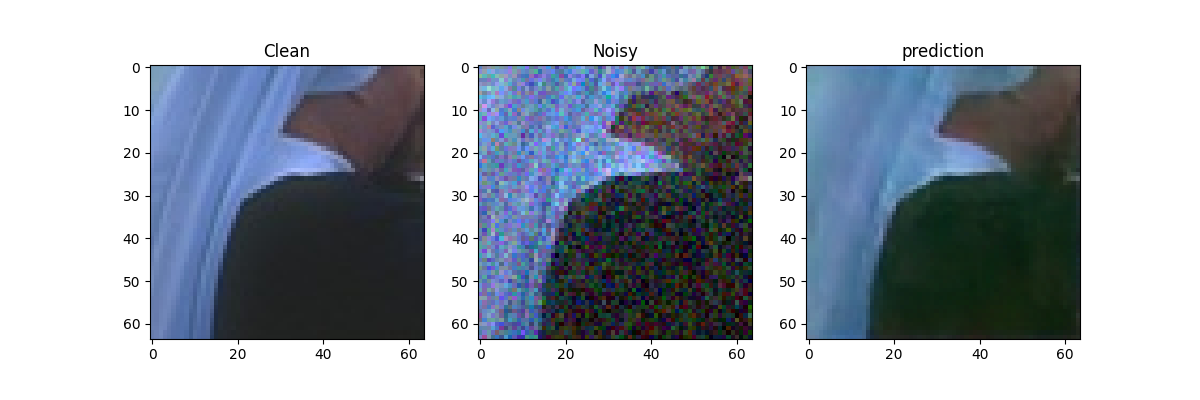
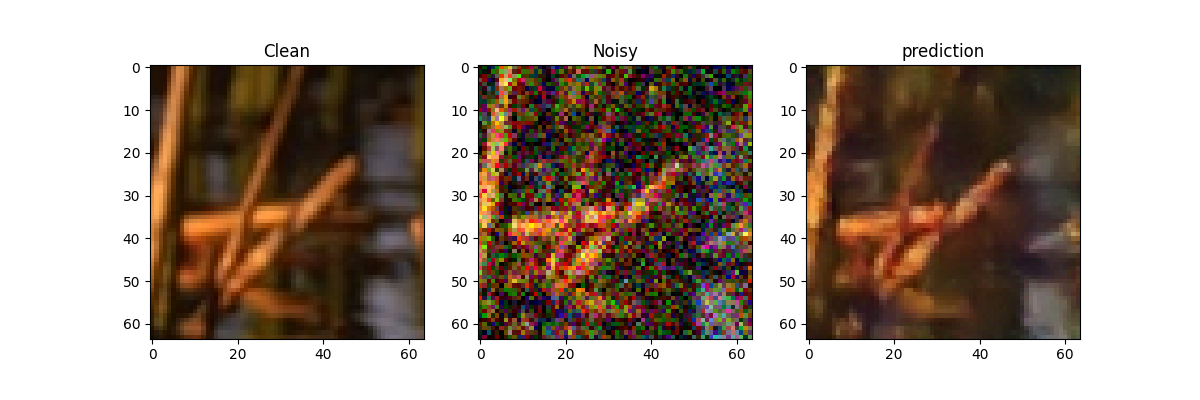
import numpy as npclass Train():def __init__(self,model,train_dir,val_dir,params) -> None:self.cuda = params['cuda']if self.cuda:self.model = model.cuda()else:self.model = modelself.train_dir = train_dirself.val_dir = val_dir# how to add noise: gaussian/poison/ text self.noise_model = params['noise_model'] self.crop_size = params['crop_size']# pair with noise figure or clean figureself.clean_targs = params['clean_targs']self.lr = params['lr']self.epochs = params['epochs']# Wbatch sizeself.bs = params['bs']self.train_dl, self.val_dl = self.__getdataset__()self.optimizer = self.__getoptimizer__()self.scheduler = self.__getscheduler__()self.loss_fn = self.__getlossfn__(params['lossfn'])def __getdataset__(self):train_ds = NoisyDataset(self.train_dir, crop_size=self.crop_size, train_noise_model=self.noise_model,clean_targ=self.clean_targs)train_dl = DataLoader(train_ds, batch_size=self.bs, shuffle=True)val_ds = NoisyDataset(self.val_dir, crop_size=self.crop_size, train_noise_model=self.noise_model,clean_targ=True)val_dl = DataLoader(val_ds, batch_size=self.bs)return train_dl, val_dldef __getoptimizer__(self):return optim.Adam(self.model.parameters(), self.lr)def __getscheduler__(self):return lr_scheduler.ReduceLROnPlateau(self.optimizer, patience=self.epochs/4, factor=0.5, verbose=True)def __getlossfn__(self, lossfn):if lossfn == 'l2':return nn.MSELoss()elif lossfn == 'l1':return nn.L1Loss()else:raise ValueError('No such loss function supported')def evaluate(self):val_loss = 0self.model.eval()for _, valid_datalist in enumerate(self.val_dl):if self.cuda:source = valid_datalist[0].cuda()target = valid_datalist[-2].cuda()else:source = valid_datalist[0]target = valid_datalist[-2]_op = self.model(Variable(source))if len(valid_datalist) == 4:if self.cuda:mask = Variable(valid_datalist[1].cuda())else:mask = Variable(valid_datalist[1])_loss = self.loss_fn(mask * _op, mask * Variable(target))else:_loss = self.loss_fn(_op, Variable(target))val_loss += _loss.datareturn val_lossdef train(self):pbar = tqdm(range(self.epochs))for i in pbar:tr_loss = 0# train modeself.model.train()for train_datalist in self.train_dl:# the the pair noise dataif self.cuda:source = train_datalist[0].cuda()target = train_datalist[-2].cuda()else:source = train_datalist[0]target = train_datalist[-2]# train the nueral network_op = self.model(Variable(source))# if use the "multiplicative_bernoulli" just calculate the difference with the masked placeif len(train_datalist) == 4:if self.cuda:mask = Variable(train_datalist[1].cuda())else:mask = Variable(train_datalist[1])_loss = self.loss_fn(mask * _op, mask * Variable(target))else:_loss = self.loss_fn(_op, Variable(target))tr_loss += _loss.dataself.optimizer.zero_grad()_loss.backward()self.optimizer.step()val_loss = self.evaluate()#self.scheduler.step(val_loss)pbar.set_description('Train loss: {:.4f}, Val loss: {:.4f}'.format(tr_loss,val_loss))# save temp reusltwith torch.no_grad():if i%50==0:source = train_datalist[0].cuda()pred = self.model(Variable(source))img = train_datalist[-1].cuda()plt.figure(figsize=(12,4))plt.subplot(131)plt.imshow(torch.squeeze(img[0]).cpu().detach().numpy())plt.title("Clean")plt.subplot(132)plt.imshow(np.transpose(torch.squeeze(source[0]).cpu().detach().numpy(),(1,2,0)))plt.title("Noisy")plt.subplot(133)plt.imshow(np.transpose(torch.squeeze(abs(pred[0])).cpu().detach().numpy(),(1,2,0)))plt.title("prediction")if not os.path.exists("./result/{}".format(self.noise_model[0]+"_"+str(self.noise_model[1]))):os.makedirs("./result/{}".format(self.noise_model[0]+"_"+str(self.noise_model[1])))plt.savefig("./result/{}/{}.png".format(self.noise_model[0]+"_"+str(self.noise_model[1]),i))plt.close()(4) 完整流程
model = SRResnet(3, 64)params = {'noise_model': ('gaussian', 50),'crop_size': 64,'clean_targs': False,'lr': 0.001,'epochs': 1000,'bs': 32,'lossfn': 'l2','cuda': True
}trainer = Train(model, 'dataset/train/', 'dataset/valid/', params)
4. 总结
方法:
- 强行让NN学习两张 零均值噪声图片之间的映射关系
- 样本数量少:学习了两种零均值噪声的映射变换
- 样本数量多:噪声不可预测,需要最小化loss,NN倾向于输出所有可能的期望值,也就是干净图片
结果:
- 对于DIP、Self2Self的方法,不需要估计图像的先验信息、对噪声图像进行似然估计
- 对于监督学习方法,无需干净图像,只需要噪声数据对
- 性能有的时候回超过监督训练方法
问题:
- 当损失函数和噪声不匹配的时候,该方法训练的模型误差较大
- 均值为0的假设太强,很难进行迁移、范围性有限