ROS1ROS2之CmakeList.txt和package.xml用法详解
前言:目前还在学习ROS+无人机框架中,,,
更多更新文章详见我的个人博客主页【前往】
文章目录
- 1. CMakeLists.txt与package.xml的作用
- 2. 生成CMakeLists.txt
- 2.1 ROS1
- 2.2 ROS2
- 3. CMakeLists.txt编写
- 3.1 ROS1
- 3.2 ROS2
- 4. package.xml编写
- 5. 其他--Setup.py的修改
1. CMakeLists.txt与package.xml的作用
在ROS系统的功能包中 要包含 CMakeLists.txt 与 package.xml 文件来编译功能包的内容
CMakeLists.txt原本是Cmake编译系统的规则文件,而Catkin编译系统基本沿用了CMake的编译风格,只是针对ROS工程添加了一些宏定义。所以在写法上,catkin 的 CMakeLists.txt与CMake的基本一致。用cmake命令创建功能包时,会自动生成CMakeList.txt文件,已配置了多数编译选项,且包含详细的注释,只需稍作修改便可编译自己的文件。
而package.xml文件是描述功能包清单的文件,包括功能包的名称、版本号、作者信息、许可信息、编译依赖和运行依赖等。
所以 CMakeLists.txt 非常重要,它指定了由源码到目标文件的规则,catkin编译系统在工作时首先会找到每个package下的 CMakeLists.txt ,然后按照规则来编译构建
2. 生成CMakeLists.txt
2.1 ROS1
ROS1可通过用catkin_create_pkg命令创建功能包,这会自动生成CMakeLists.txt和package.xml文件的。
# 创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src# 注:std msgs rospy roscpp为创建功能时指定的铱赖,test为包名
# 也可以先不指定,后面在CMakeLists.txt和package.xmL中手动添加
catkin_create_pkg test std_msgs rospy roscpp# 查看一下在~/catkin_ws/src目录下自动生成了哪些文件夹和文件
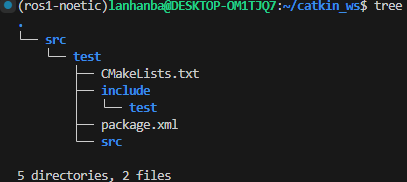
tree
通过上面的命令生成的工作空间如下
include:存放**.h**的头文件
src:可同时存放**.cpp或.py的源文件,但一般.py**文件存放在scripts目录中
scripts:习惯存放**.py的python**文件,需要自己创建注:python代码和c++代码不分家,可同时存放在同一功能包中
2.2 ROS2
ROS2可通过如下的命令来创建功能包以及必要的CMakeList.txt和package.xml文件
# 创建工作空间
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src# ament_cmake和ament_python分别代表c++和python两种代码的功能包
# test_c和test_python代表包名
ros2 pkg create --build-type ament_cmake test_c
ros2 pkg create --build-type ament_python test_python# 查看一下在~/dev_ws/src目录下自动生成了哪些文件夹和文件
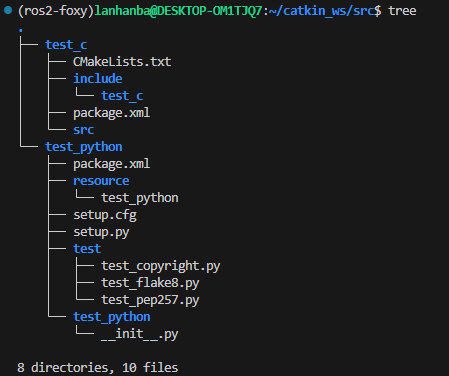
tree
通过以上命令生成的工作空间如下:
test_c/include:存放**.h**的头文件
test_c/src:存放**.cpp的C++**源文件
test_python/test_python:存放**.py的python**文件注:与ROS1不同,同一功能包内只能同时包含python文件或者C++文件中的一种
3. CMakeLists.txt编写
3.1 ROS1
- 常用的ROS1中CMakeLists.txt架构如下
视频解析参考:中科院软件所-机器人操作系统入门(ROS入门教程)
cmake_minimum_required() #CMake的最低版本号project() #项目名称find_package() #找到编译需要的其他CMake/Catkin package catkin_python_setup() #catkin新加宏,打开catkin的Python Module的支持add_message_files() #catkin新加宏,添加自定义Message文件 add_service_files() #catkin新加宏,添加自定义Service文件 add_action_files() #catkin新加宏,添加自定义Action文件 generate_message() #catkin新加宏,生成不同语言版本的msg/srv/action接口 catkin_package() #catkin新加宏,生成当前package的cmake配置,供依赖本包的其他软件包调用 add_library() #生成库 add_executable() #生成可执行二进制文件add_dependencies() #定义目标文件依赖于其他目标文件,确保其他目标已被构建 target_link_libraries() #链接catkin_add_gtest() #catkin新加宏,生成测试install() #生成可安装目标
需要自己配置的项目一般就下面几种:
-
include_directories
- 用于设置头文件的相对路径
- 全局路径默认为功能包所在目录,功能包的头文件一般放在功能包根目录下的include文件夹,
所以需要此处添加此文件夹 - 还包含catkin编译器默认的其他头文件路径,如:ROS默认安装路径、Linux系统路径等
-
add_exectuable
- 用于设置需要编译的代码和可执行文件
- 第一个参数为期望生成的可执行文件(节点)名称
- 后面的参数为参与编译的源文件(.cpp),若需要多个代码文件,可依次列出,空格分隔
-
target_link_libraries
- 用于设置链接库
- 有些功需要使用系统或第三方库函数,通过该选项可以配置执行文件链接的库文件
- 第一个参数与add_exectuable相同,为可执行文件(节点)名称
- 后面的参数为需要链接的库,依次列出,空格分隔
-
add_dependencies
- 用于设置依赖
- 有时候需要自定义消息类型,消息类型会在编译过程中产生相应语言的代码。若编译的可执行文
件依赖这些动态生成的代码,则需要添加${PROJECT NAME}generate messages_cpp配置
-
自定义数据类型:消息msg、服务srv、动作action
- find_package(catkin REQUIRE COMPONENTS message_generation)
- catkin_package(CATKIN_DEPENDS message_runtime)
- add_message_files(FILES xxx.msg)
- add_service_files(FILES xxx.srv)
- add_action_files(FILES xxx.action)
- generate_messages(DEPENDENCIES std_msgs)
CMakeLists.txt模板参考:CMakeLists.txt
更多教程参考:catkin/CMakeLists.txt - ROS Wiki
3.2 ROS2
常用的ROS2中CMakeLists.txt架构如下
cmake_minimum_required() #CMake的最低版本号project() #项目名称find_package() #查找系统中的依赖项ament_target_dependencies() #依赖于其他目标文件,确保其他目标已被构建 add_executable() #生成可执行二进制文件install() #生成可安装目标ament_package() #生成功能包rosidl_generate_interfaces() # 自定义消息类型接口
示例模板如下
cmake_minimum_required(VERSION 3.5)
project(test_c)# Default to C99
if(NOT CMAKE_C_STANDARD)set(CMAKE_C_STANDARD 99)
endif()# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)add_executable(talker src/publisher_member_function.cpp) # 修改2
ament_target_dependencies(talker rclcpp std_msgs) # 修改3install(TARGETStalker # 修改4DESTINATION lib/${PROJECT_NAME})if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# uncomment the line when a copyright and license is not present in all source files#set(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# uncomment the line when this package is not in a git repo#set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()# 添加自定义消息类型需要添加项
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"msg/Num.msg" # 自定义1"msg/Sphere.msg" # 自定义2"srv/AddThreeInts.srv" # 自定义3DEPENDENCIES geometry_msgs
)ament_package()
相较于基于catkin的CMake文件,基于ament的明显简洁很多
假设你编写了~/dev_ws/src/test.cpp文件后,需要修改的步骤如下:
- 链接源代码
add_executable(test src/test.cpp) # test为你输入节点后执行的名称,如ros2 run test_c test(前一个test_c为包名,后一个test则为这里的设置的名称,代表具体执行的代码)
ament_target_dependencies(test rclcpp) # 添加依赖项
- 添加下面这两行代码的目的是让编译器编译
~/dev_ws/src/test_c/test.cpp这个文件
install(TARGETStestDESTINATION lib/${PROJECT_NAME}
)
当你自定义消息类型时还需要消息类型文件
# 添加自定义消息类型需要添加项
# 下面两项是固定的,geometry_msgs是用于生成消息依赖包
find_package(geometry_msgs REQUIRED)
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(${PROJECT_NAME}"msg/Num.msg" # 自定义1"msg/Sphere.msg" # 自定义2"srv/AddThreeInts.srv" # 自定义3DEPENDENCIES geometry_msgs
)
4. package.xml编写
package.xml的框架如下
<package format="3"><name>..</name><version>0.0.0</version><description>...</description><maintainer email="lanhanba@todo.todo">...</maintainer><license>...</license><buildtool_depend>...</buildtool_depend><exec_depend>...</exec_depend><exec_depend>...</exec_depend><export><build_type>...</build_type></export>
</package>
相较于CMakeList.txt,package.xml的语法就简单许多,且ROS1和ROS2的标签语法通用
- <build_depend></build_depend>: 标签定义了功能包中代码编译时所依赖的其他功能包
- <exec_depend><exec_depend>: 标签定义了功能包中可执行程序运行时所依赖的其他功能包
- 自定义数据类型:话题消息msg、服务数据srv、动作数据action
模板如下
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>test_c</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="lanhanba@todo.todo">lanhanba</maintainer><license>TODO: License declaration</license><!-- ROS1 --><buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend><!-- ROS2_C++ --><buildtool_depend>ament_cmake</buildtool_depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><export><build_type>ament_cmake</build_type></export><!-- ROS2_python --><test_depend>ament_copyright</test_depend><test_depend>ament_flake8</test_depend><test_depend>ament_pep257</test_depend><test_depend>python3-pytest</test_depend><export><build_type>ament_python</build_type></export><!-- ROS2中C++功能包添加自定义消息类型还需添加下面三行(固定形式,和上面的CMake修改搭配使用,python不需要) --><depend>rosidl_default_generators</depend><depend>geometry_msgs</depend><member_of_group>rosidl_interface_packages</member_of_group></package>
5. 其他–Setup.py的修改
在ROS2-Python功能包中,如果添加类似~/dev_ws/src/test_python/test.py的python文件,则需要对功能包中的Setup.py进行如下的修改
from setuptools import setuppackage_name = 'test_python'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='lanhanba',maintainer_email='lanhanba@todo.todo',description='TODO: Package description',license='TODO: License declaration',tests_require=['pytest'],entry_points={'console_scripts': [# 结构如下:节点名 = 功能包名.代码文件.执行入口函数名(一般执行入口函数名都是main,也就是说python代码中一般要有main函数)# 通过ros2 run test_python test 来执行test_python.test:main下的函数# 如果有多个python代码文件都需要一一添加,名称不能一样"test = test_python.test:main","test2 = test_python.test2:main"],},
)
参考:
catkin/CMakeLists.txt - ROS Wiki
CMakeLists.txt - ROS Humble Wiki
【ROS 学习笔记】CMakeLists.txt 与 package.xml - 知乎 (zhihu.com)
详细分析一个ROS2 CMakeLists.txt文件_首飞爱玩机器人的博客-CSDN博客