仿真每日一练 | Workbench中接触种类及选择方法简介
Workbench中给我们提供的接触类型主要包括以下几种👇
◆ 1、摩擦
◆ 2、无摩擦
◆ 3、绑定
◆ 4、不分离
◆ 5、粗糙
◆ 6、强制滑移
下面通过最常用的摩擦和绑定给大家展示两者的区别,同时文末也给大家介绍了几种接触的选择方法。首先先给大家介绍一下求解流程,如下:
1. 有限元仿真流程
1-1、前处理
1-1-1、几何模型构建
1-1-2、材料定义
1-1-3、有限元系统模型构建
1-2、求解
1-2-1、加载条件/边界条件
1-2-2、求解设置
1-2-3、大变形
1-3、后处理
1-3-1、查看结果
1-3-2、评估结果
1-3-3、修正结果
2. 前处理
2-1、几何模型构建
因为计模型比较简单,直接采用DM进行建模,建模尺寸以及建模效果如图1。
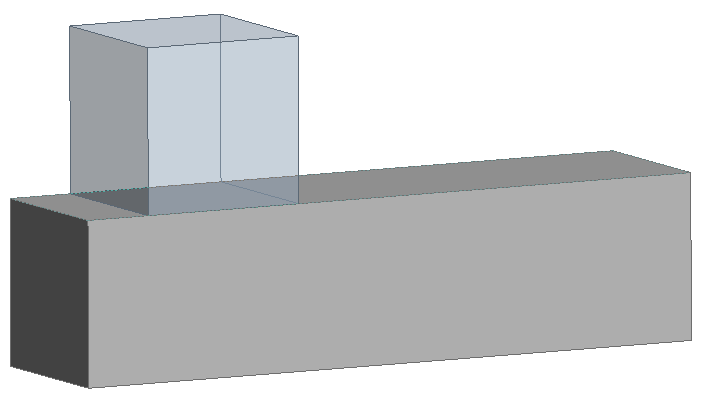
图1
2-2、材料的定义
进行材料的定义,采用默认材料:结构钢。
2-3、构建有限元系统模型
主要包括7要素,对应的类型见图2
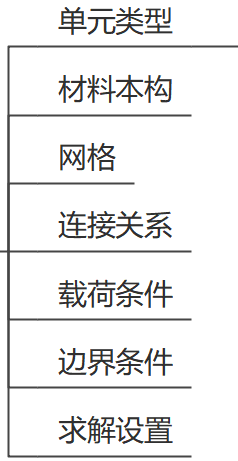
图2
具体操作流程以及操作步骤如图3:
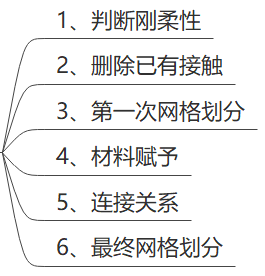
图3
2-3-1、判断刚柔性:全局采用柔性体
2-3-2、默认为绑定接触
由于第一次进行绑定测试,可以直接使用默认接触;
2-3-3、第一次网格划分如图4
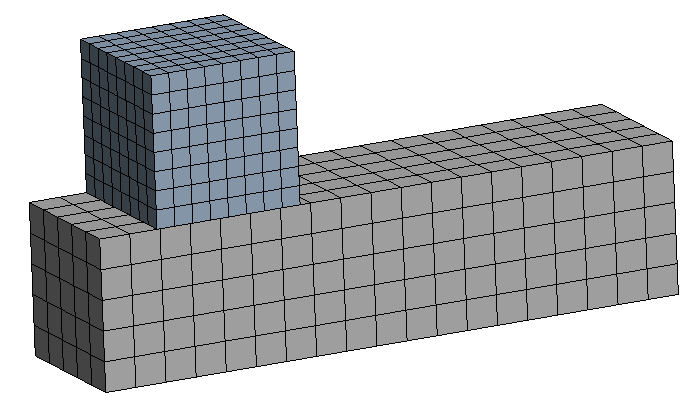
图4
2-3-4、材料赋予:采用默认结构钢
2-3-5、连接关系设定:采用默认绑定接触
2-3-6、最终网格划分见图5
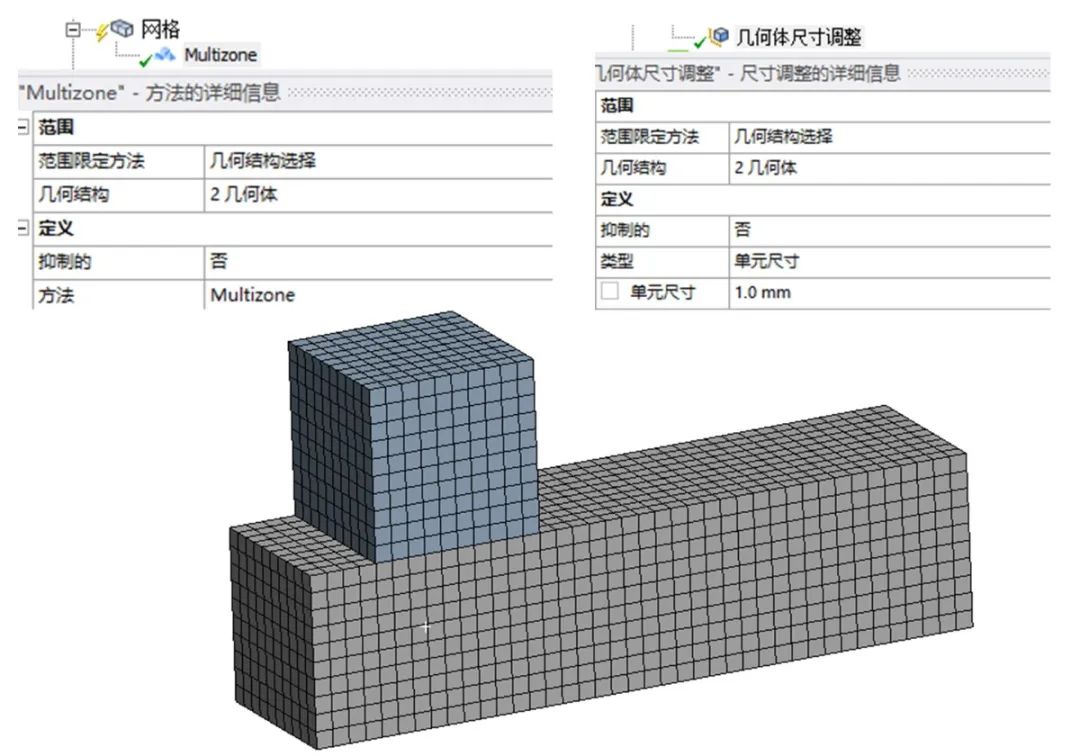
图5
3. 求解
3-1、加载条件/边界条件如下图
对下方长方体两侧施加固定约束,如图6
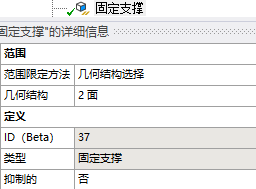
图6
对上方小正方体施加强制位移,如图7
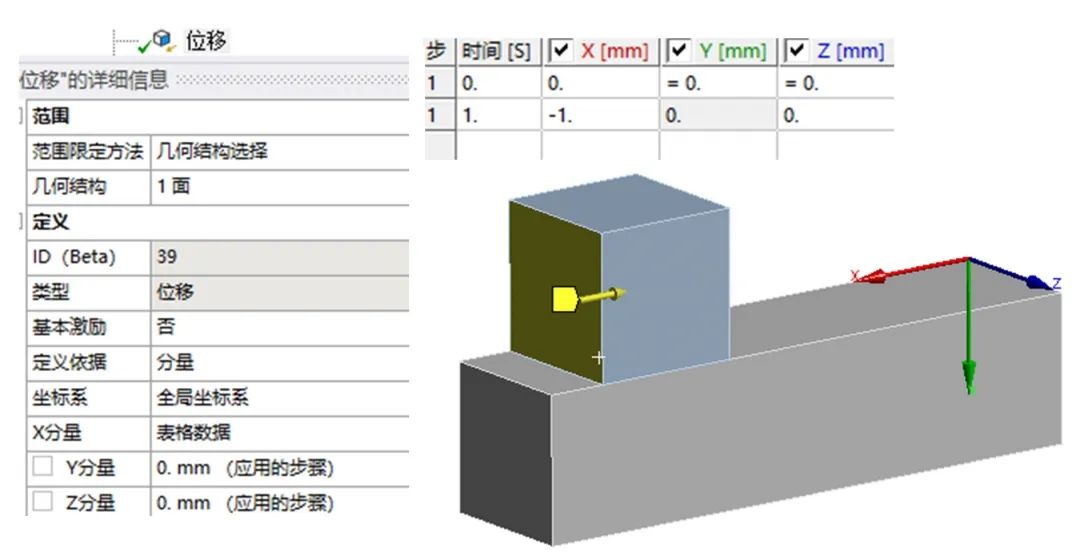
图7
3-2、求解设置
求解设置如图8所示
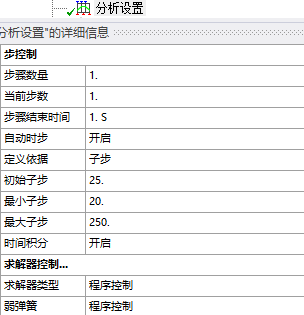
图8
3-3、大变形默认
4. 后处理
变形以及应力分布如图9所示:
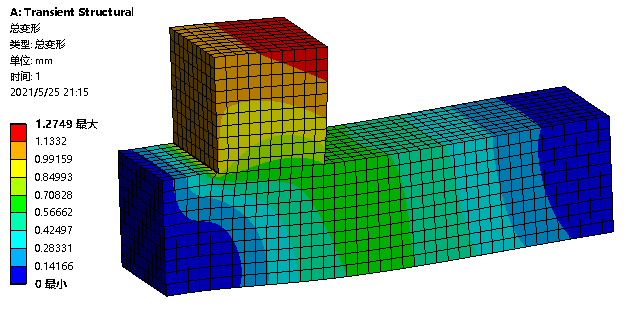
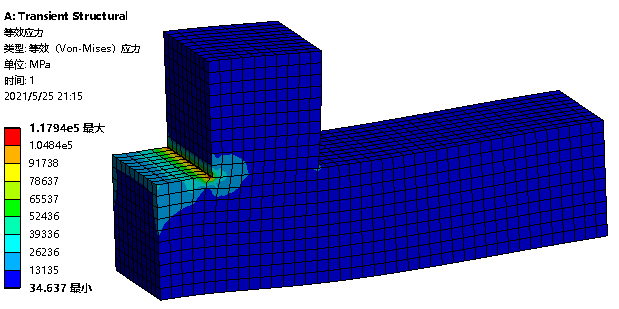
图9
由上图可见,整个单元发生扭曲,两者间未发生相对移动。下面按照上面的流程,将绑定接触更改为摩擦,施加同样的载荷进行求解,求解结果如图10所示
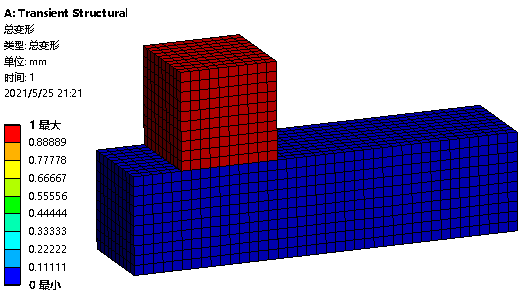
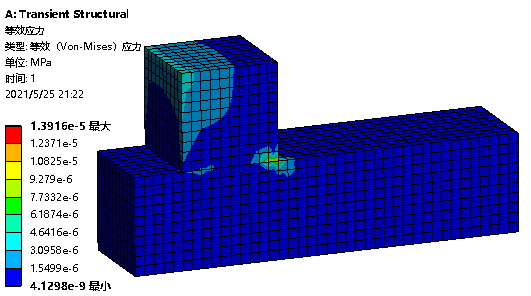
图10
两者之间发生相对移动,明显与绑定有不同的结果,这也是我们进行接触类型选择的判断依据之一,下方也给大家总结接触的选择依据
