【TMS570LC4357】之相关驱动开发学习记录1
系列文章目录
【TMS570LC4357】之工程创建
【TMS570LC4357】之工程配置修改
【TMS570LC4357】之HALCOGEN使用
【TMS570LC4357】之相关问题及解决
———————————————————
前言
记录笔者在第一次使用TMS570过程中对外设驱动的一些学习碎片。
1. RTI
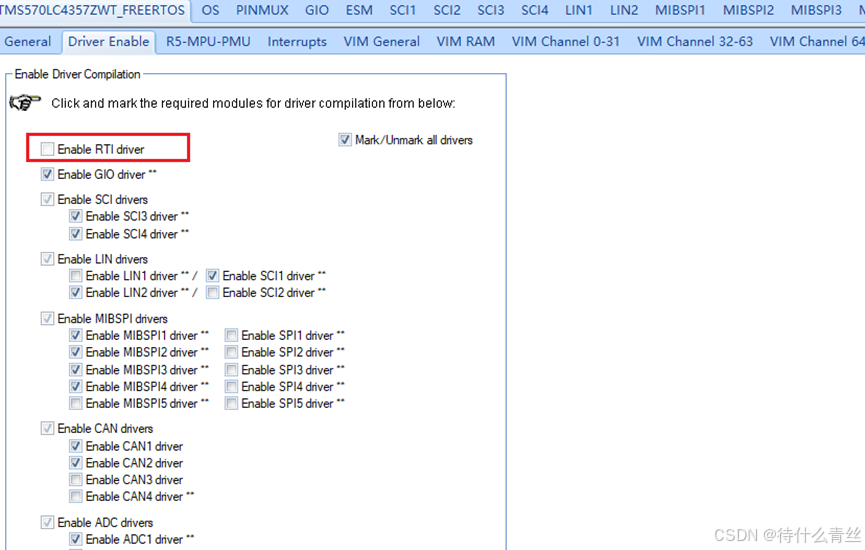
1.1 添加操作系统的HLcoGenera 无法生成其他RTI
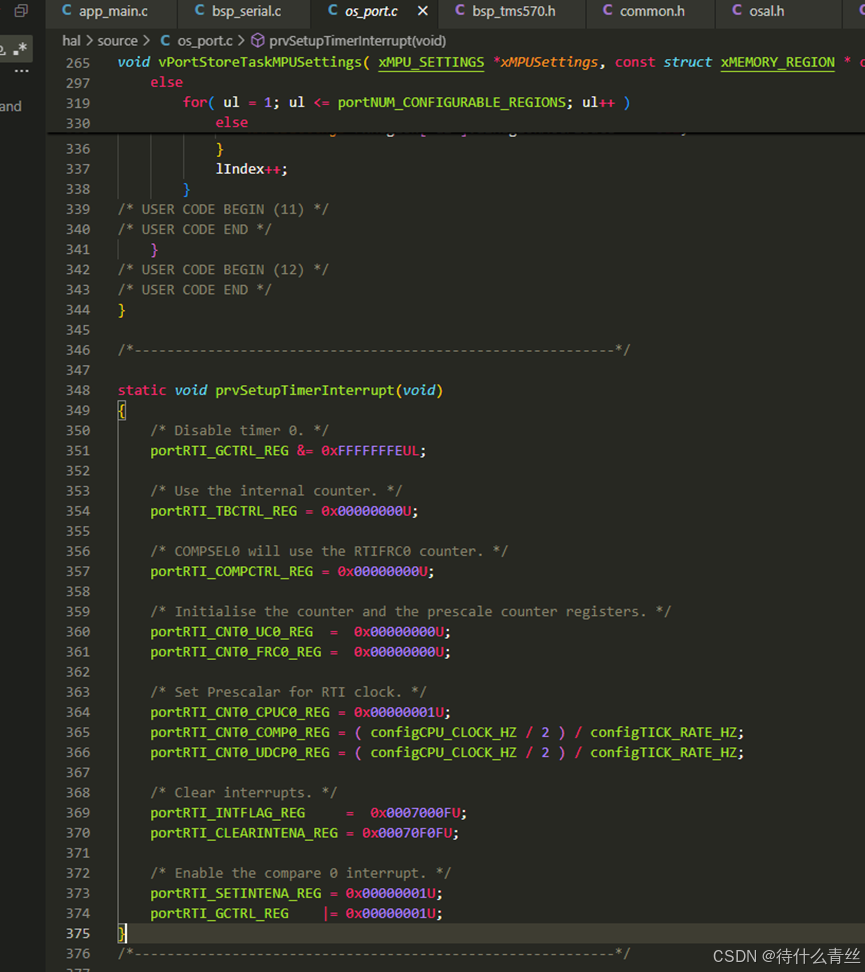
1.2 官方支持在prvSetupTimerInterrupt中修改
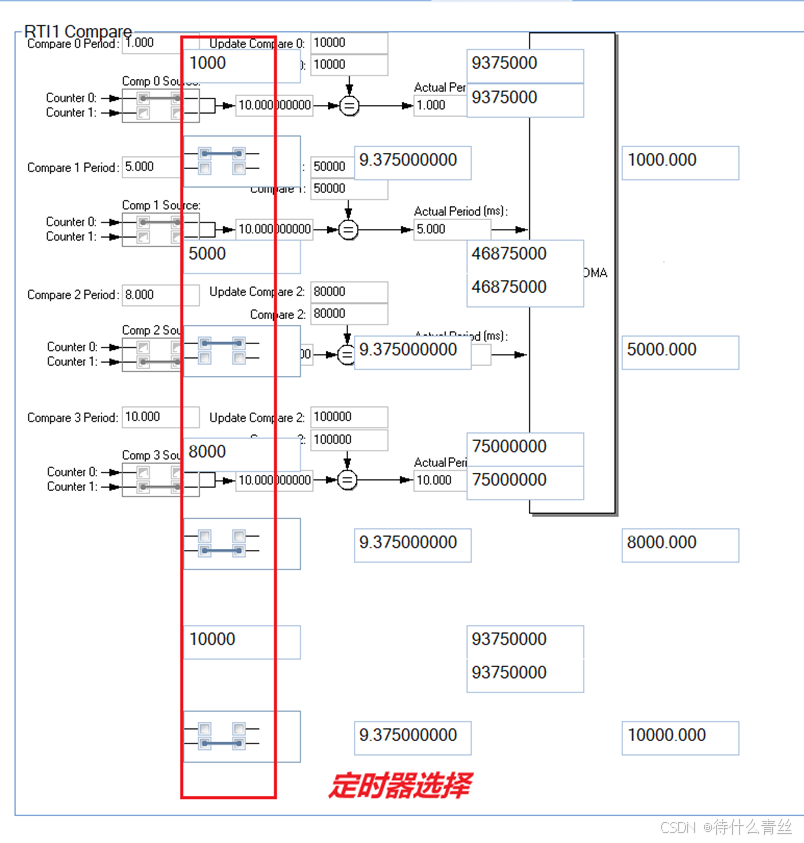
1.3 在halcogeneral 中修改定时器时间
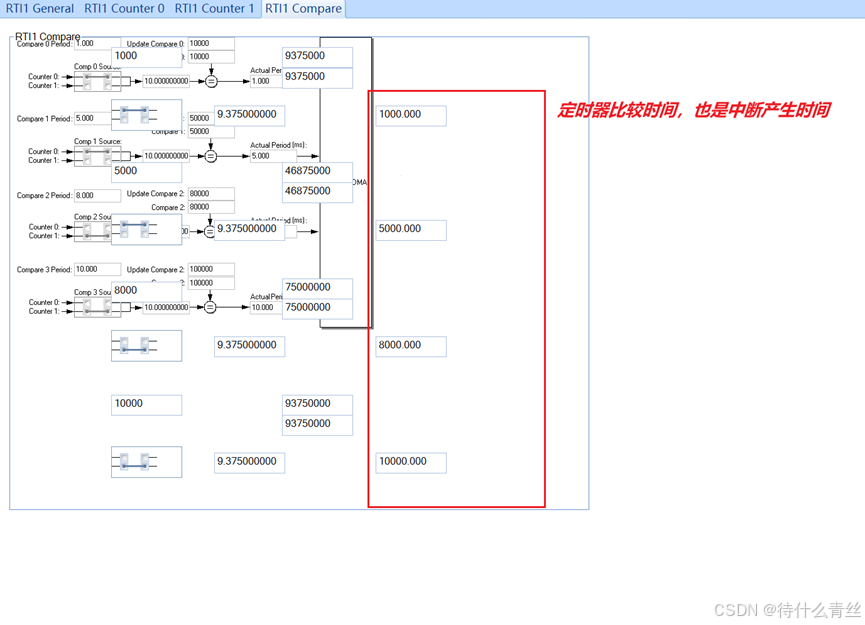

配置compare3 和 1比较,compare2 和0 比较
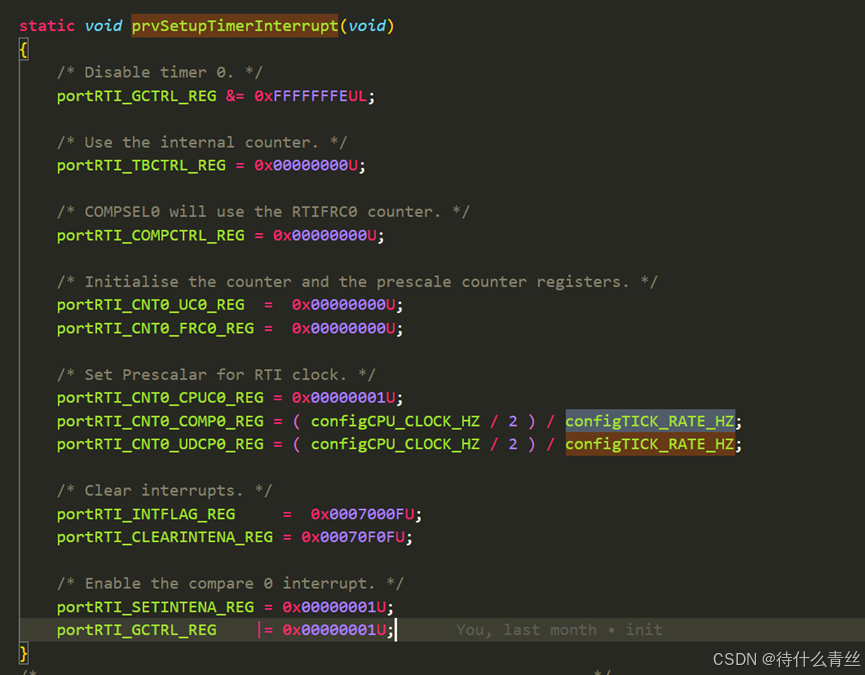
FreeRTOS 通过RTI 定时器来同步系统时钟,比较寄存器和更新寄存器的计数值
75MHZ/2/1000HZ
2. SCI
2.1 中断接收
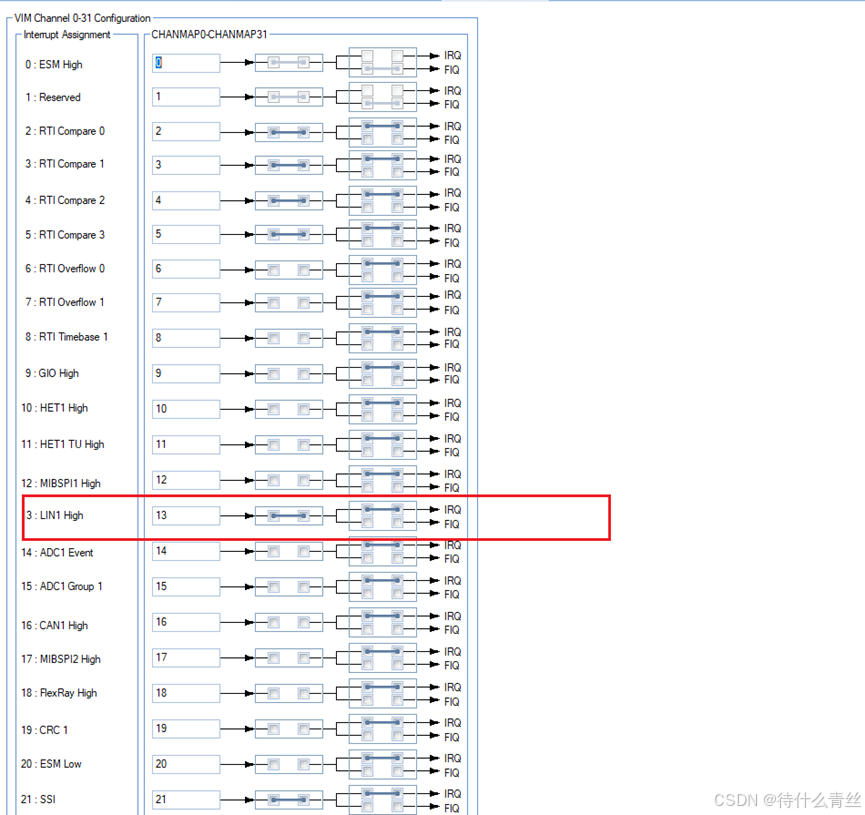
配置高优先级中断(配置低优先级中断)
初始化串口配置,输出,波特率,8位数据位,一位停止位,配置中断类型,
VIM中断向量表中会有中断回调函数
中断回调函数中必须使用freeRTOS中断API接口()
set interrupt level :设置VIM中断向量表中高优先级还是低优先级
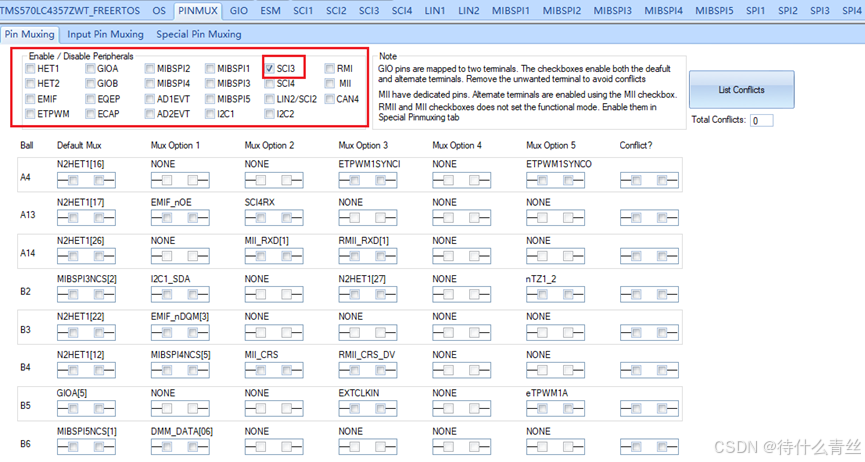
2.2 SCI3属于复用端口,对于复用端口配置需要额外配置
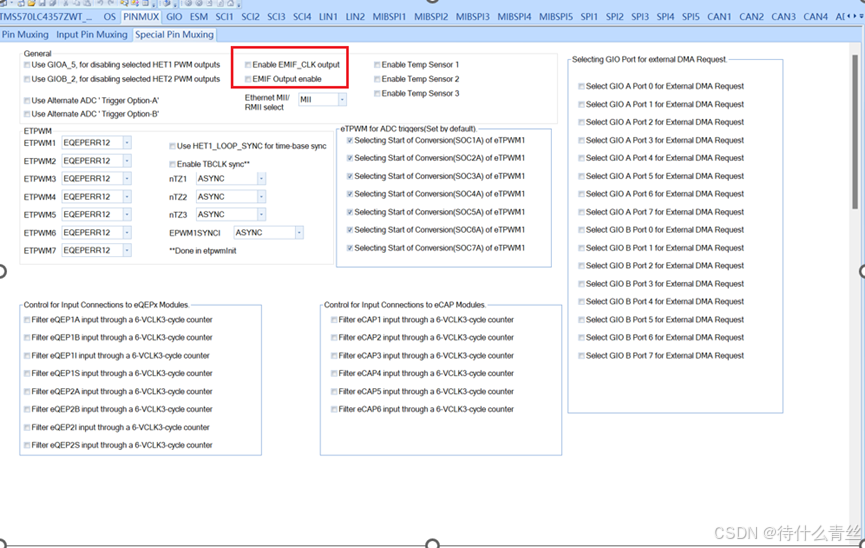
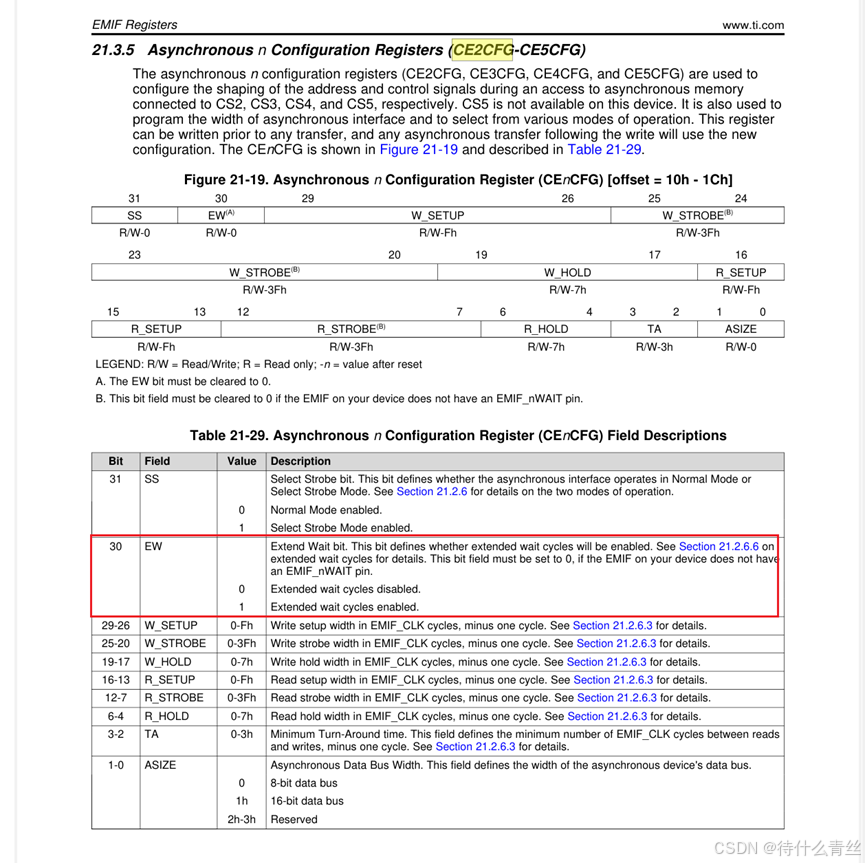
3. EMIF
配置
可外接SDRAM和nor Flash
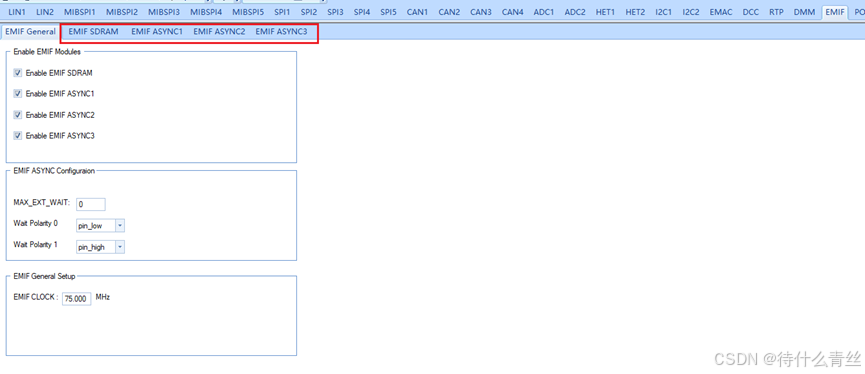
得复用端口,和时钟
排除引脚功能冲突
4. FreeRTOS
#define configMAX_PRIORITIES ( 5 ) 需要大于等于实际线程优先级,数值越大优先级越高,越占资源
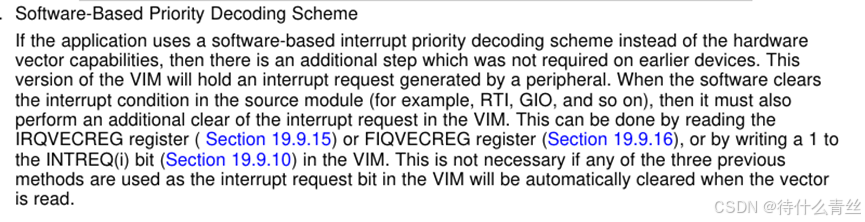
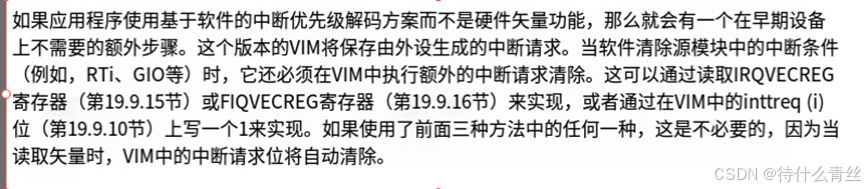
5. VIM中断
硬件上不允许中断嵌套,软件上需要自己去实现
中断嵌套
原理图
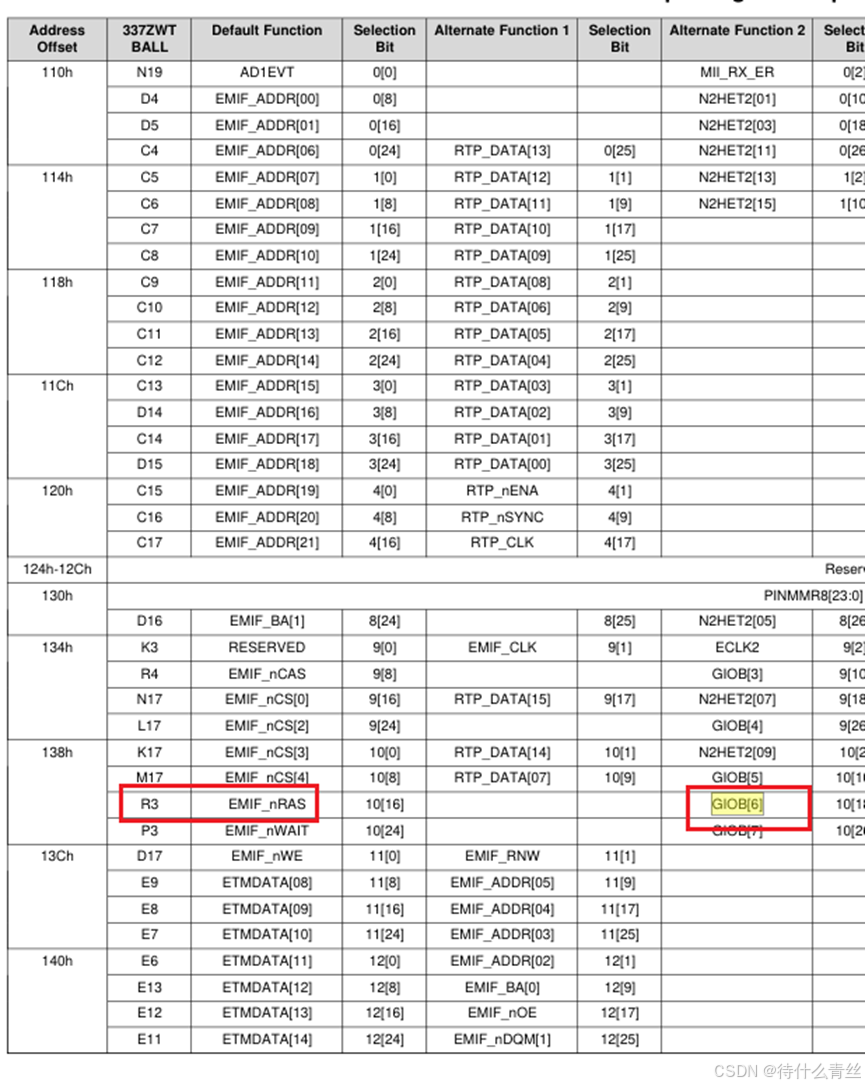
GIOB_6/NERROR1/10.3C
最前面是默认功能,后面是可以复用的功能