【【51单片机直流电机调速】】
学会电机调速,掌握中国速度
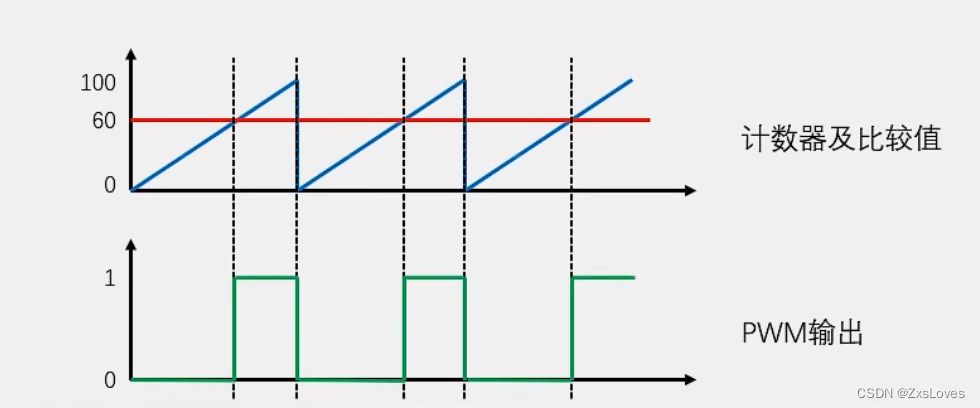
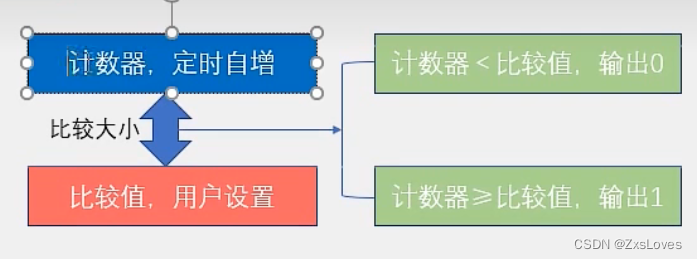
PWM的生成方法
先用户设定一个比较值,然后计数器定时自增。
当计数器<比较值,输出0
当计数器>比较值,输出1
main.c
#include <REGX52.H>
#include"delay.h"
#include"key.h"
#include"Nixie.h"
#include"Timer0.h"unsigned char Counter,Compare;
unsigned char KeyNum,Speed;
sbit Motor=P1^0;void main()
{Timer0_Init();while(1){KeyNum=Key();if(KeyNum==1){Speed++;Speed%=4;if(Speed==0){Compare=0;}if(Speed==1){Compare=50;}if(Speed==2){Compare=75;}if(Speed==3){Compare=100;}}Nixie(1,Speed);} }void Timer0_Routine() interrupt 1
{TL0 = 0x9C; //设置定时初值TH0 = 0xFF; //设置定时初值Counter++;Counter%=100;if(Counter<Compare){Motor=1;}else{Motor=0;}
}
delay.c
void Delay(unsigned int xms) //@12.000MHz
{while(xms){unsigned char i, j;i = 2;j = 239;do{while (--j);} while (--i);xms--;
}
}
delay.h
#ifndef _DELAY_H__
#define _DELAY_H__
void Delay(unsigned int xms);#endif
key.c
#include <REGX52.H>
#include "Delay.h"/*** @brief 获取独立按键键码* @param 无* @retval 按下按键的键码,范围:0~4,无按键按下时返回值为0*/
unsigned char Key()
{unsigned char KeyNumber=0;if(P3_1==0){Delay(20);while(P3_1==0);Delay(20);KeyNumber=1;}if(P3_0==0){Delay(20);while(P3_0==0);Delay(20);KeyNumber=2;}if(P3_2==0){Delay(20);while(P3_2==0);Delay(20);KeyNumber=3;}if(P3_3==0){Delay(20);while(P3_3==0);Delay(20);KeyNumber=4;}return KeyNumber;
}
key.h
#ifndef __KEY_H__
#define __KEY_H__unsigned char Key();#endif
Nixie.c
#include <REGX52.H>
#include "Delay.h" //包含Delay头文件//数码管段码表
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};//数码管显示子函数
void Nixie(unsigned char Location,Number)
{switch(Location) //位码输出{case 1:P2_4=1;P2_3=1;P2_2=1;break;case 2:P2_4=1;P2_3=1;P2_2=0;break;case 3:P2_4=1;P2_3=0;P2_2=1;break;case 4:P2_4=1;P2_3=0;P2_2=0;break;case 5:P2_4=0;P2_3=1;P2_2=1;break;case 6:P2_4=0;P2_3=1;P2_2=0;break;case 7:P2_4=0;P2_3=0;P2_2=1;break;case 8:P2_4=0;P2_3=0;P2_2=0;break;}P0=NixieTable[Number]; //段码输出//Delay(1); //显示一段时间//P0=0x00; //段码清0,消影
}
Nixie.h
#ifndef __NIXIE_H__
#define __NIXIE_H__void Nixie(unsigned char Location,Number);#endif
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化,100us@12.000MHz* @param 无* @retval 无*/
void Timer0_Init(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0x9C; //设置定时初值TH0 = 0xFF; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0=1;EA=1;PT0=0;
}
Timer0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__void Timer0_Init(void);#endif