SLAM中的非线性优化-2D图优化之激光SLAM基于优化的前端匹配(十八)
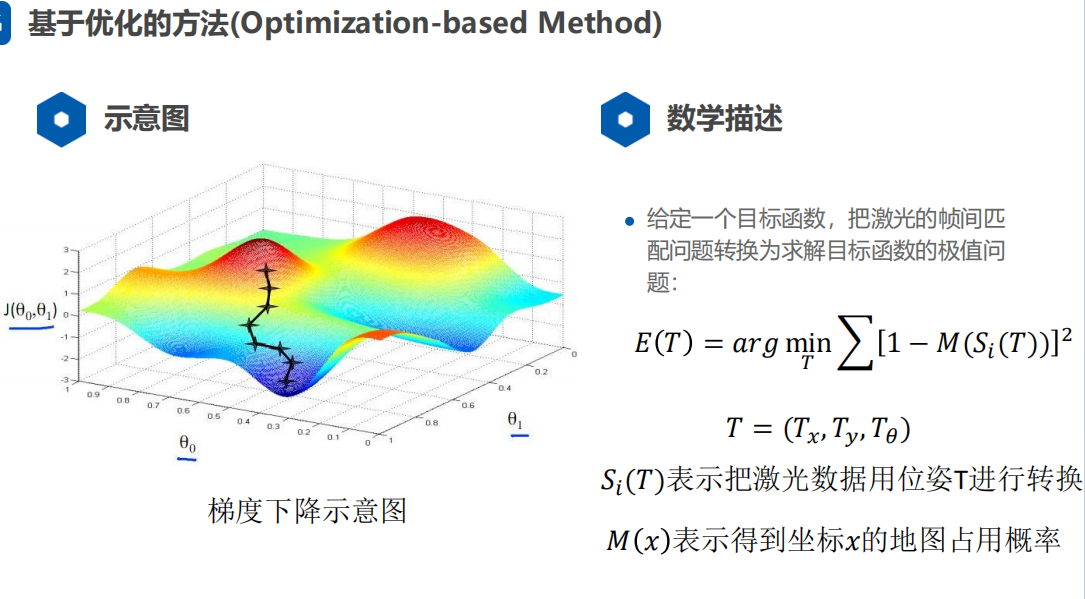
本节介绍下基于优化的前端匹配算法原理,与cartographer的区别主要是一个用双线性插值,一个用三次样条插值,其本质较为相似,这里简单列举下,请继续收看前端匹配之基于优化的方法。
总结
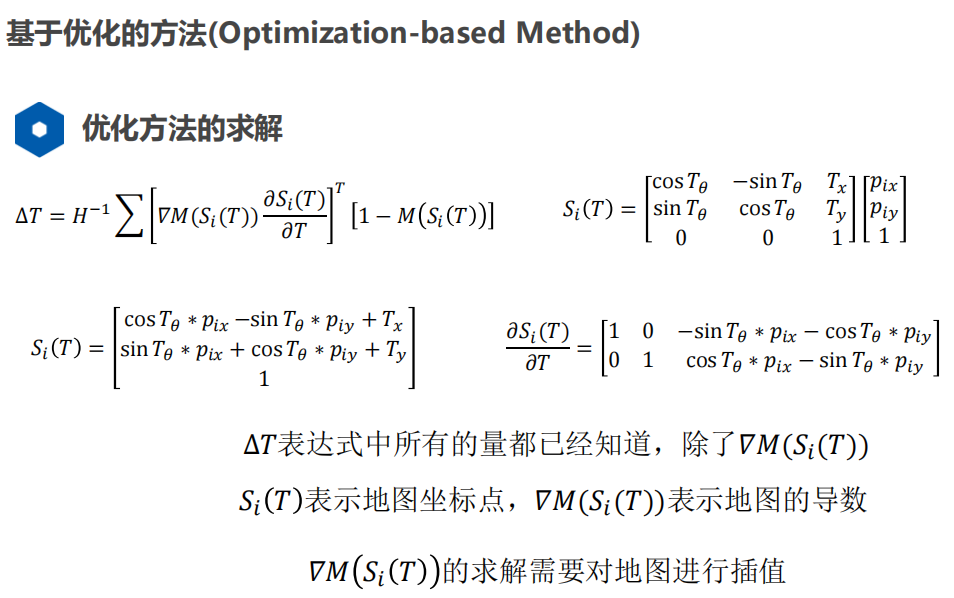
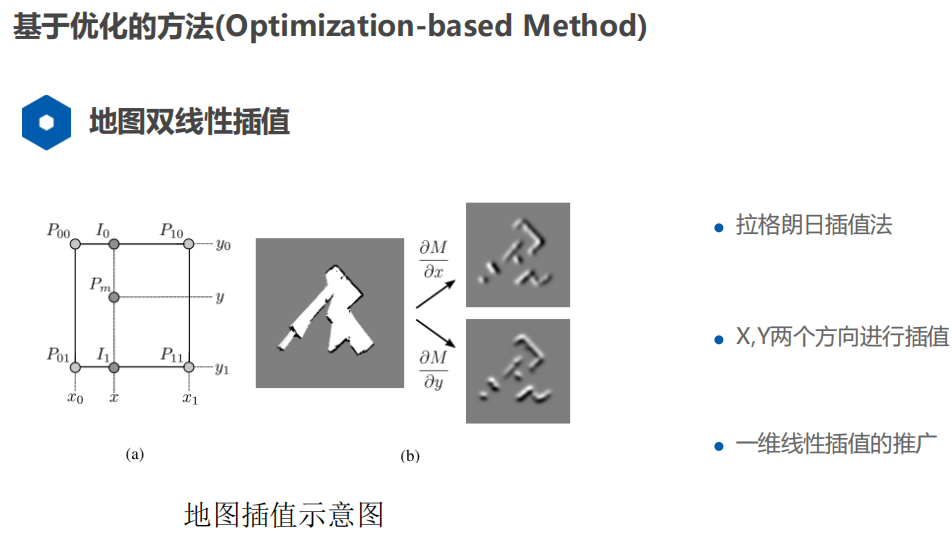
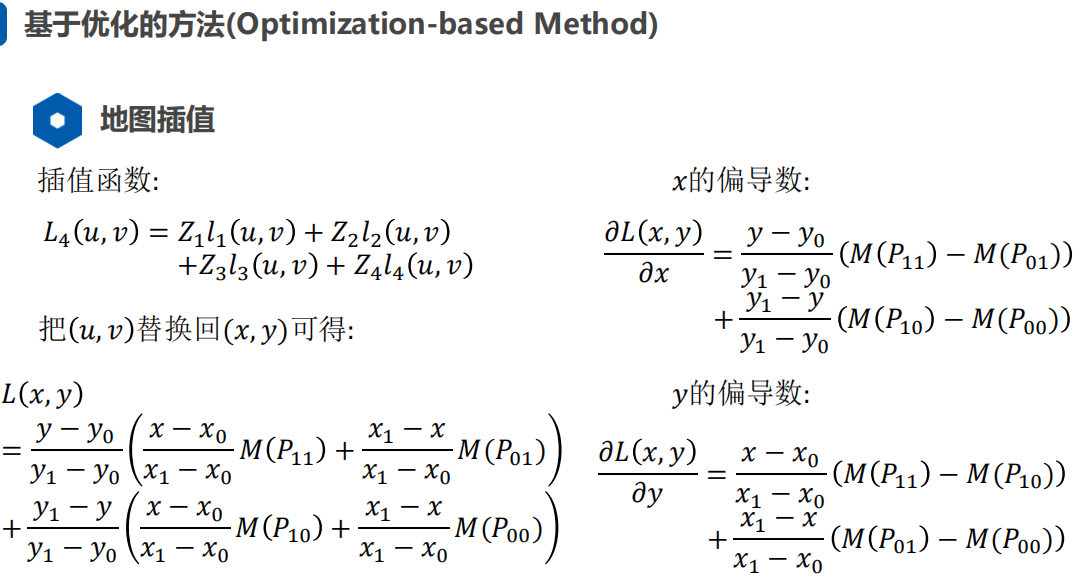
如上所述,即为2D栅格中对概率对位姿的求导,实际上就是利用了链式法则,并利用双线性插值,将离散的栅格空间变成了连续可导函数,如此便可轻易求出相关导数,并且每一步的求解都很简单,本节就到这里,下一节实战篇.
本节介绍下基于优化的前端匹配算法原理,与cartographer的区别主要是一个用双线性插值,一个用三次样条插值,其本质较为相似,这里简单列举下,请继续收看前端匹配之基于优化的方法。
总结
如上所述,即为2D栅格中对概率对位姿的求导,实际上就是利用了链式法则,并利用双线性插值,将离散的栅格空间变成了连续可导函数,如此便可轻易求出相关导数,并且每一步的求解都很简单,本节就到这里,下一节实战篇.