无人机悬停技术运行与难点分析
一、运行方式
1. 状态感知:
通过IMU(惯性测量单元)实时获取姿态角(俯仰、横滚、偏航)和加速度数据。
高度信息由气压计(低空)、超声波传感器(10米内)或毫米波雷达(高精度抗干扰)提供。
水平定位依赖GPS(室外)或视觉/光流定位(室内或无GPS环境),后者通过摄像头捕捉地面纹理位移估算位置。
2. 控制决策:
飞控系统将传感器数据与预设悬停坐标对比,生成纠偏指令。例如,检测到高度下降时,增大电机功率抬升高度。
3. 动力执行:
通过调节无刷电机转速改变旋翼升力,实现姿态与位置调整。飞控系统每秒进行数百次微调以抵消风扰。
二、技术要点
1. 定位与感知系统
多传感器融合:结合GPS、IMU、视觉/光流、毫米波雷达数据,通过扩展卡尔曼滤波(EKF)或互补滤波算法消除单一传感器误差。
抗干扰设计:
毫米波雷达通过相位频谱分析高度变化(公式:`Δh = (Δφ·λ)/(4π)`,Δφ为相位差,λ为波长),避免地面移动物体干扰。
视觉定位在GNSS失效时自动切换,跟踪地面固定目标实现位置锁定。
2. 控制算法
改进型PID控制:引入模糊自适应或串级PID提升抗风性,但需解决超调与实时性问题。
高级滤波算法:
基于四元数的EKF:降低姿态解算计算量,适应高速动态响应。
李雅普诺夫稳定性控制:用于吊挂负载无人机,抑制摆动(如专利CN120178677A)。
3. 动力与能源优化
电机效率控制:巡航时电机功率比悬停低20%(悬停需100%输出对抗重力),减少能耗。
新型推进系统:氢电混动(如ZeroAvia ZA600)提升悬停续航,解决锂电池高倍率放电容量衰减问题。
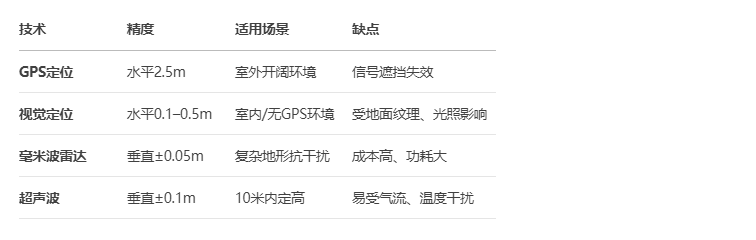
表:悬停定位技术对比
三、技术难点
1. 抗风扰稳定性
强风导致姿态角波动,传统PID控制响应滞后。需结合滑模控制增强鲁棒性,但存在“抖振”问题。
解决方案:神经网络预测风扰轨迹(如LSTM模型),提前生成补偿力矩。
2. 能源效率优化
悬停能耗比前飞高30%:旋翼下洗气流形成湍流区增大诱导阻力,且电机持续满功率运行导致温升(60–70℃),降低锂电池有效容量10%。
创新方向:
无线充电悬停技术:宇称-时间对称(PT-symmetric)系统实现耦合系数波动下的恒功率充电,避免降落能耗。
氢燃料电池:能量密度是锂电池的3倍,延长任务时间(如Cavorite X7 eVTOL)。
3. 复杂环境感知
视觉定位在单一颜色地面失效,光流法对水面/反光面误差大。
毫米波雷达需解决多路径反射干扰,通过谱峰检测+相位差分提升信噪比。
4. 轻量化与负载平衡
吊挂负载时(如电力巡检设备),负载摆动引发无人机姿态失稳。需建立弹性悬挂模型,设计非线性控制器同步收敛位置与摆角。
四、总结与发展趋势
无人机悬停技术正向高精度、低功耗、强抗扰演进:
人工智能融合:深度学习优化控制参数(如Red Cat Trichon无人机集成Palantir AI)。
新型推进系统:氢电/混动推进突破续航瓶颈。
动态无线充电:实现悬停状态高效补能,扩展任务半径。
当前难点集中于复杂环境适应性与能源管理,需跨学科协作突破传感器极限与动力瓶颈。
