四足机器人远程视频与互动控制的全链路方案
随着机器人行业的快速发展,特别是四足仿生机器人在巡检、探测、安防、救援等复杂环境中的广泛部署,如何实现高质量、低延迟的远程视频监控与人机互动控制,已经成为制约其应用落地与规模化推广的关键技术难题。
四足机器人常常面临以下挑战:
-
多场景适配需求:如厂区自动巡检、野外勘探、狭窄空间探测等,对通信与控制系统要求极高;
-
实时性与安全性要求并重:远程操控必须具备秒级以下的响应能力,否则将影响任务完成甚至造成安全风险;
-
弱网与高动态场景的适应能力:网络条件波动频繁,机器人必须具备在 4G/5G、Wi-Fi、专网等不同链路下稳定运行的能力。
针对这些行业痛点,近年来我们与国内某头部四足机器人研发企业展开深度合作,围绕机器人低延迟远程控制、高清视频回传、多端实时互动等关键能力构建了一整套成熟可落地的技术链路。
该技术体系不仅满足工业级可靠性需求,还兼顾灵活部署与可扩展性,现已在多个实战场景中部署验证。
本文将以典型应用场景为引导,从系统架构、协议选择、端到端延迟控制策略等维度,深入解析四足机器人远程视频与控制系统的核心技术构建方式,
并重点介绍大牛直播SDK在这一体系中的角色与价值,帮助行业从业者更好地理解“视觉 + 控制 + 通信”融合系统的构建路径。
一、行业应用场景剖析
1️⃣ 远程环境巡检与智能巡逻
在工业园区、能源基地、变电站及无人化车间,四足机器人承担着代替人工的日常巡检任务。
通过搭载高性能摄像头与传感设备,机器人能够将巡检过程中的高清视频与状态信息实时回传至监控中心,为运维人员提供第一手数据,实现对设备状态、环境异常的远程实时监控与预警,大幅提升巡检效率与安全保障水平。
2️⃣ 危险环境探测与应急响应
在灾后搜救、化工泄漏、火灾现场、狭窄复杂空间等高风险环境中,四足机器人凭借其出色的越障能力和稳定的视频传输系统,成为人类进入危险区域前的“前哨”。依托高质量视频回传与低延迟控制链路,操作人员可在安全区域内远程操控机器人进行探测、取证与初步干预,有效降低风险,提升应急响应效率。
3️⃣ 一对一远程操控与互动管理
对于需要精细化操控的应用场景,如远程检修、复杂地形跨越、特定任务执行,操控人员可通过专用控制终端与四足机器人建立一对一的低延迟专线连接。结合视频回传、控制指令下发与机器人状态反馈,实现如临现场般的实时互动,不仅保障操作的精准性,还能通过语音、数据等多通道融合,实现对机器人智能行为的深度远程管理。
二、SmartMediakit核心技术优势
作为专注于音视频传输领域多年的专业 SDK,大牛直播SDK在四足机器人远程视频与控制场景下,提供了全链路、跨平台的技术能力,全面支撑从视频回传到互动控制的应用需求。
1️⃣ 超低延迟的 RTSP/RTMP 视频链路
-
RTSP 协议支持
面向局域网、专网或专线环境,提供毫秒级低延迟(100~250ms)的实时视频推流与播放能力,适用于工业巡检、专网控制与本地监控系统。 -
RTMP 协议支持
面向公网、云端或广域分发,实现秒级低延迟的视频传输,便于与云平台、远程监控中心、直播系统无缝对接。 -
智能缓冲与丢包重传机制
内置 Jitter Buffer 优化 与 丢包恢复 模块,保证在弱网、波动网络环境下的视频播放流畅度与连贯性,极大提升系统的鲁棒性与用户体验。
Android平台Unity共享纹理模式RTMP播放延迟测试
2️⃣ 实时互动与专线控制通道集成
-
专为一对一控制设计的专线连接能力
支持控制指令、视频回传、状态反馈的全链路低延迟通信,确保远程控制的操作及时性与稳定性。 -
可与定制控制协议深度集成
SDK 提供开放式接口,可无缝集成四足机器人的自研控制协议或专属控制逻辑,实现通信、控制与媒体数据的一体化管理。
3️⃣ 全平台支持与易于集成的开发能力
-
多平台 SDK 覆盖
全面支持 Android、iOS、Windows、Linux、Unity3D,满足多终端、多环境下的应用集成需求。 -
灵活嵌入与模块化接入
可作为独立视频模块集成至机器人控制 App、工业级控制台或仿真环境,同时支持与主控系统、远程管理系统的快速集成。 -
易于定制与二次开发
提供完整的 API 文档与二次开发支持,满足企业级定制需求,快速实现业务落地。
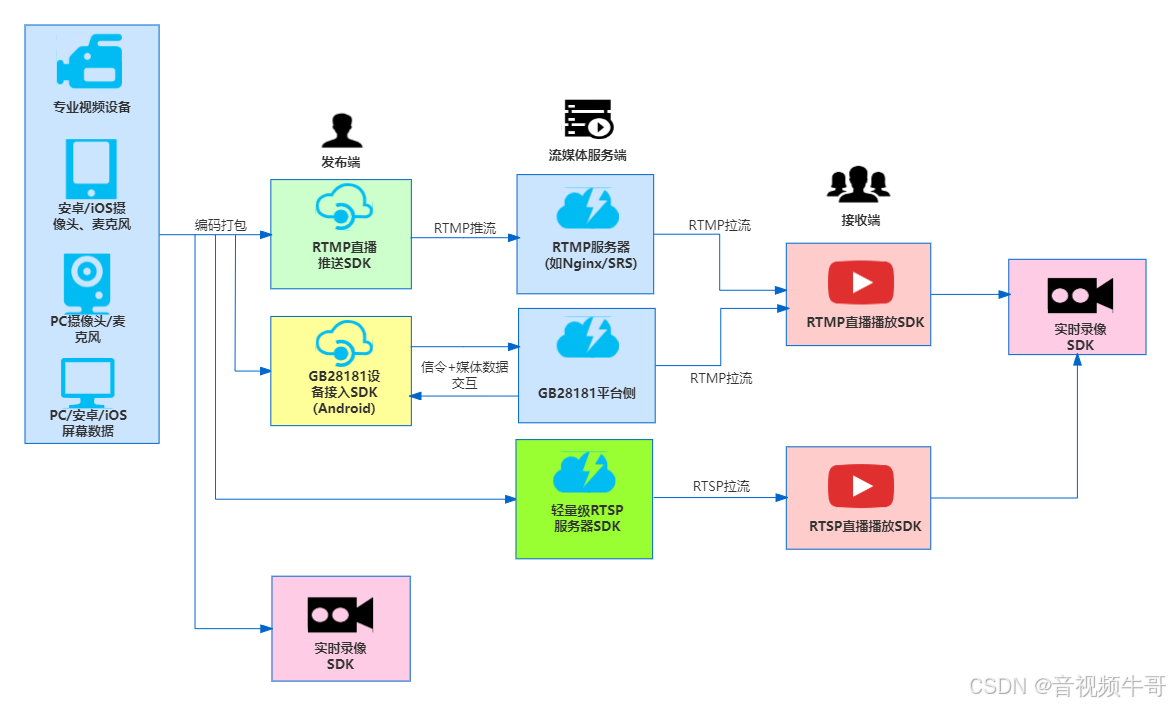
三、典型应用架构
在实际应用中,四足机器人的远程视频回传与控制系统,通常采用**“机器人端 → 网络传输 → 控制端”**的典型三层架构,结合大牛直播SDK,构建出高可靠、低延迟的业务链路。
[ 四足机器人 ] ↧ 实时 RTSP / RTMP 推流
[ 专网 / 公网 / 专线 ] ↧
[ 控制终端 (App / Unity3D) ] ↧
[ 大牛直播SDK:视频播放 + 实时互动控制 ]1️⃣ 机器人端 — 实时视频推流与状态采集
-
内置 RTSP/RTMP 推流模块,支持开机即推、任务中断恢复推流
-
支持高清视频编码(H.264/H.265),高码率或低码率可灵活切换
-
可配合机器人状态采集模块,实时上传环境与传感数据
2️⃣ 传输链路 — 灵活的网络适配
-
支持 专网、公网或专线传输
-
可部署边缘中转服务器,优化跨地域传输与访问速度
-
弱网环境下配合 SDK 优化机制,保障传输质量与连接稳定
3️⃣ 控制端 — 视频回放与互动控制一体化
-
通过 大牛直播SDK 播放模块 实现低延迟视频接收与播放
-
集成 一对一互动控制模块,保障控制命令的实时响应
-
支持多终端形态:
-
移动端 App(Android/iOS)
-
Unity3D 仿真与控制平台
-
工业 PC 端专用控制软件
-
4️⃣ 可扩展的部署模式
-
点对点直连:控制端与机器人端通过专网或局域网直接通信,延迟更低
-
云端中转部署:适合公网环境或多终端协同访问,支持高并发、分布式管理
四、实战效果与典型成果
通过与多家四足机器人企业的深度合作,我们基于大牛直播SDK构建的远程视频与控制解决方案,
已在多个真实项目场景中得到验证,取得了良好的实战效果:
✅ 智能环境巡检项目
在工业园区与无人值守厂区的巡检应用中,四足机器人搭载高清视频采集模块,结合 4G/5G 网络,通过 RTSP 推流 + 大牛直播SDK 播放链路,实现视频回传延迟控制在 100~200ms 以内,保障了巡检过程中的远程操控稳定性与画面实时性,有效提高了巡检效率与安全管控水平。
✅ 高危环境探测与作业项目
在化工厂区、灾后现场等危险环境部署中,结合机器人机载摄像头与传感系统,通过 RTMP 推流接入云端监控平台,多终端实时查看回传画面,依托大牛SDK的丢包修复与网络自适应机制,即便在 弱信号、波动网络环境 下,仍能保障视频流的稳定性与连续性,为远程指挥与应急响应提供可靠支撑。
✅ 一对一低延迟互动控制项目
在需要高精度远程操控的场景,通过专用控制终端与机器人建立 点对点低延迟专线通道,结合大牛直播SDK的实时视频与互动控制接口,实现了毫秒级操控响应与同步的状态反馈机制,操作者能够精准操控机器人动作,同步感知环境变化与设备状态,显著提升了任务执行的安全性与操控体验。
五、总结与展望
作为智能巡检、环境探测与安防作业的重要载体,四足机器人对远程视频传输与操控系统的可靠性、实时性提出了更高要求。凭借 高兼容性、超低延迟传输能力 以及对多平台的全面支持,
大牛直播SDK 已在多个实际应用项目中,为四足机器人提供了稳定、灵活的远程视频与控制技术支撑,帮助合作伙伴实现了从本地操控到跨地域远程管理的应用突破。
未来,我们将继续与行业领先的机器人研发企业紧密协作,围绕低延迟互动、远程智能控制、云端实时视频管理等领域不断创新,共同推动四足机器人在工业巡检、应急救援与特种作业等高价值场景下的应用边界,为智能机器人行业的发展注入更强技术动力。
用边界。
👉 深入了解
官方博客:CDDN官方博客-大牛直播SDK