50ms时延工业相机
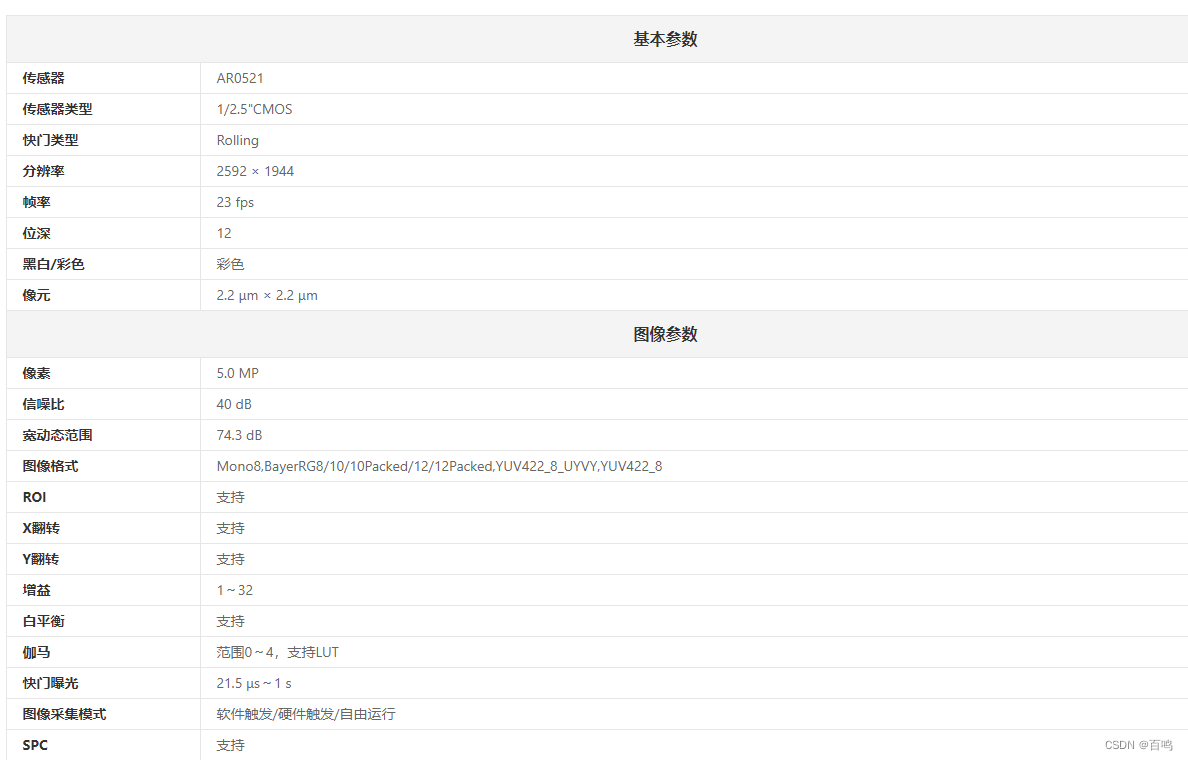
华睿工业相机A3504CG000
参数配置:
相机端到端理论时延:80ms 厂家同步信息,此款设备帧率上线23fps,单帧时延:43.48ms,按照一图缓存加上传输显示的话,厂家预估时延在:80ms 厂家还有更高帧率,更低时延的相机
SENSOPR(光转数字+算法处理) --> ISP(算法处理)→网卡驱动(数字转光),若SENSOR和ISP之间走离线模式,即模块间通信通过dma方案,则至少缓存一副图,加上算法处理故相机端的时延,43.48+算法处理+网卡处理= 50ms,显示屏的刷新时间60HZ,换算时间为:16.67ms,50+16.67 + 芯片处理时间 + 网络 = 理论上80ms左右,芯片的处理时间是和芯片本身的主频相关,更高的主频意味着更低的时延,不同的算法的处理的复杂度需要不同的时钟周期,即为时延。
若SENSOR和ISP之间走离线模式,之间的数据输出,是和相应的芯片的主频相关的,一幅图像的输出需要相应的N个时钟clock周期,这块信息厂商并没有提供!
实测:抖动80ms~160ms,请注意如下的测试方案存在一定的误差,理论最大误差在,16.67ms+16.67ms = 33.34ms(显示屏的刷新屏显2次)
若要准确,测试方案需要调整,1.毫秒走马灯 2.高速拍摄相机 3.高刷显示屏120HZ(误差8ms)或更高


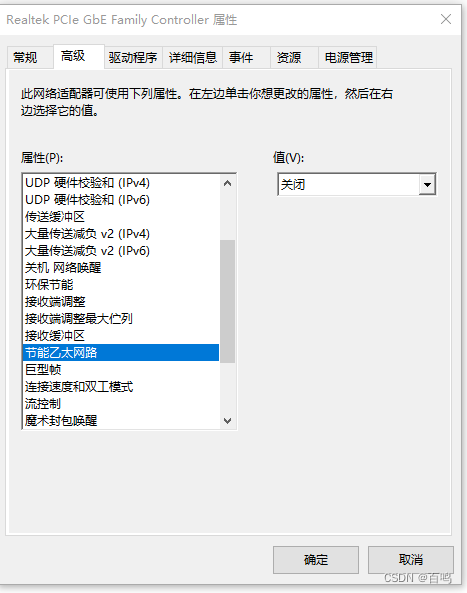
相机配置参数:



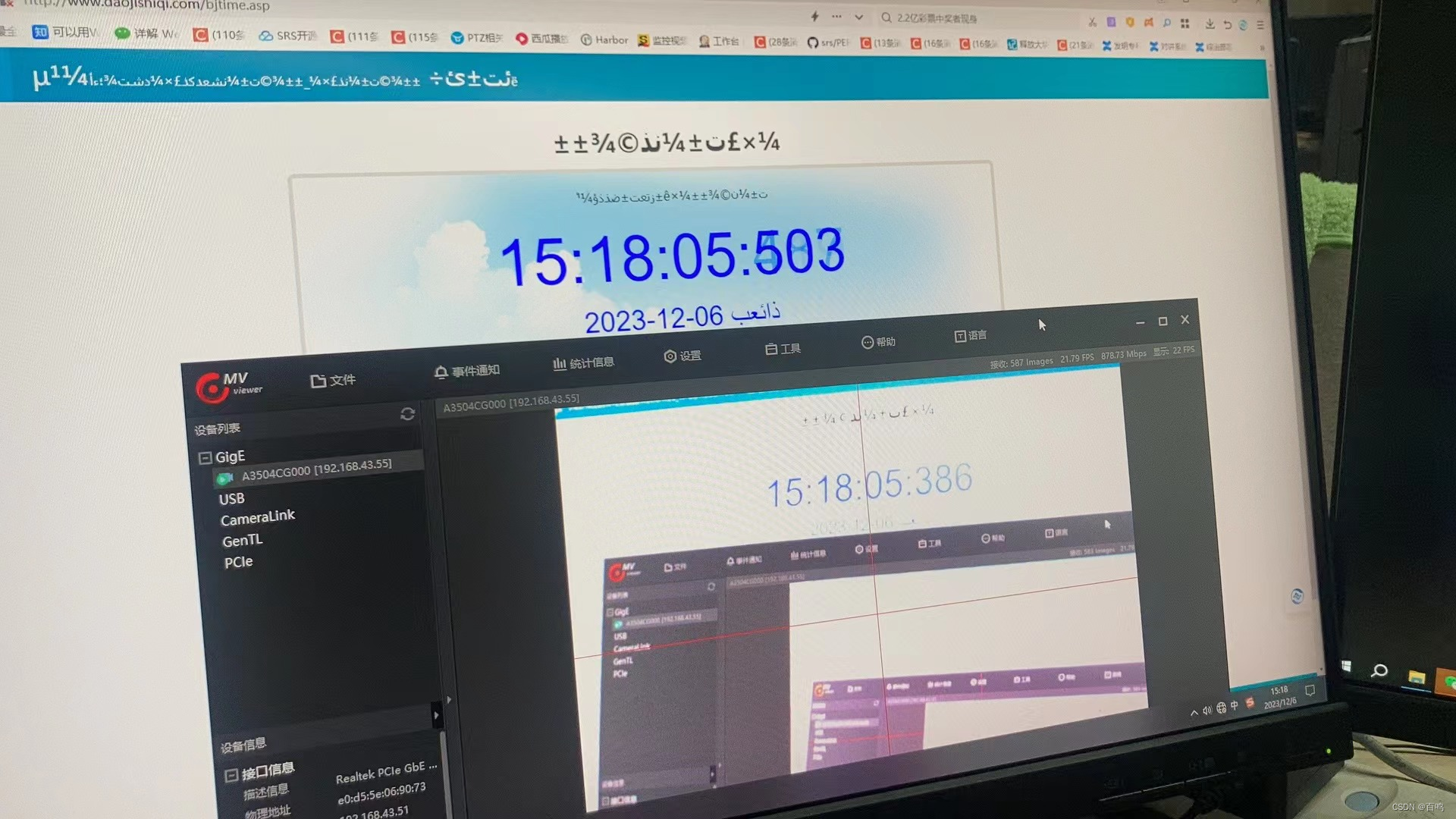
测试环境
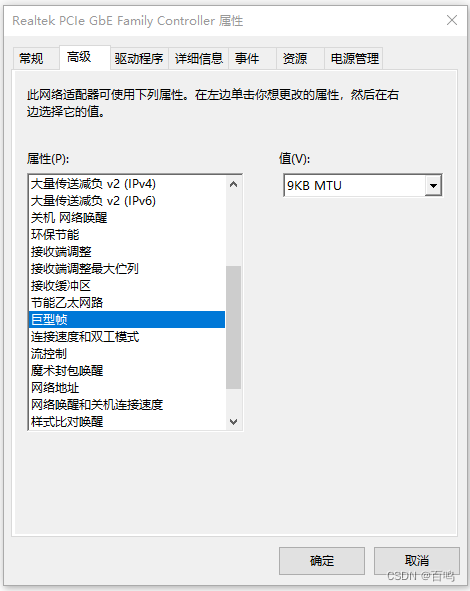
1. 5口TP-LINK千兆交换机,千兆网线2根 1米长度,工业相机:GIgE口,个人办公电脑,I5,4核心,网卡放开带宽和缓存,显示屏刷新率:50HZ
2.相机通过网线直连配置静态ip,电脑配置静态ip即可,相机自动发现





华睿客户端工具:

仅供参考,工业相机方面还有更低时延的相机。
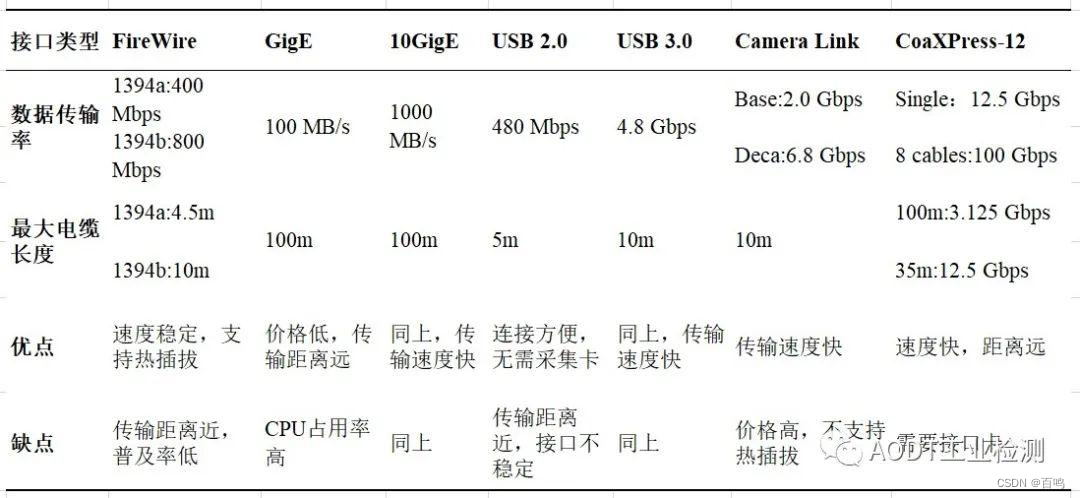
常见工业相机接口: