【STM32】TIM定时器编码器
1 编码器接口简介
Encoder Interface 编码器接口
编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
接收正交信号,自动执行CNT自增或者自减,编码器接口相当于带有方向控制的外部时钟,同时控制着CNT的计数时钟和计数方向。每隔一段时间去取一次CNT的值,再把CNT清零,每次取出来的值就表示编码器的速度。(测频法)
每个高级定时器和通用定时器都拥有1个编码器接口
两个输入引脚借用了输入捕获的通道1和通道2(CH1和CH2)
1.1 正交编码器
正交编码器一般可以测量位置或者带有方向的速度值
旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
类型:机械触点式/霍尔传感器式/光栅式

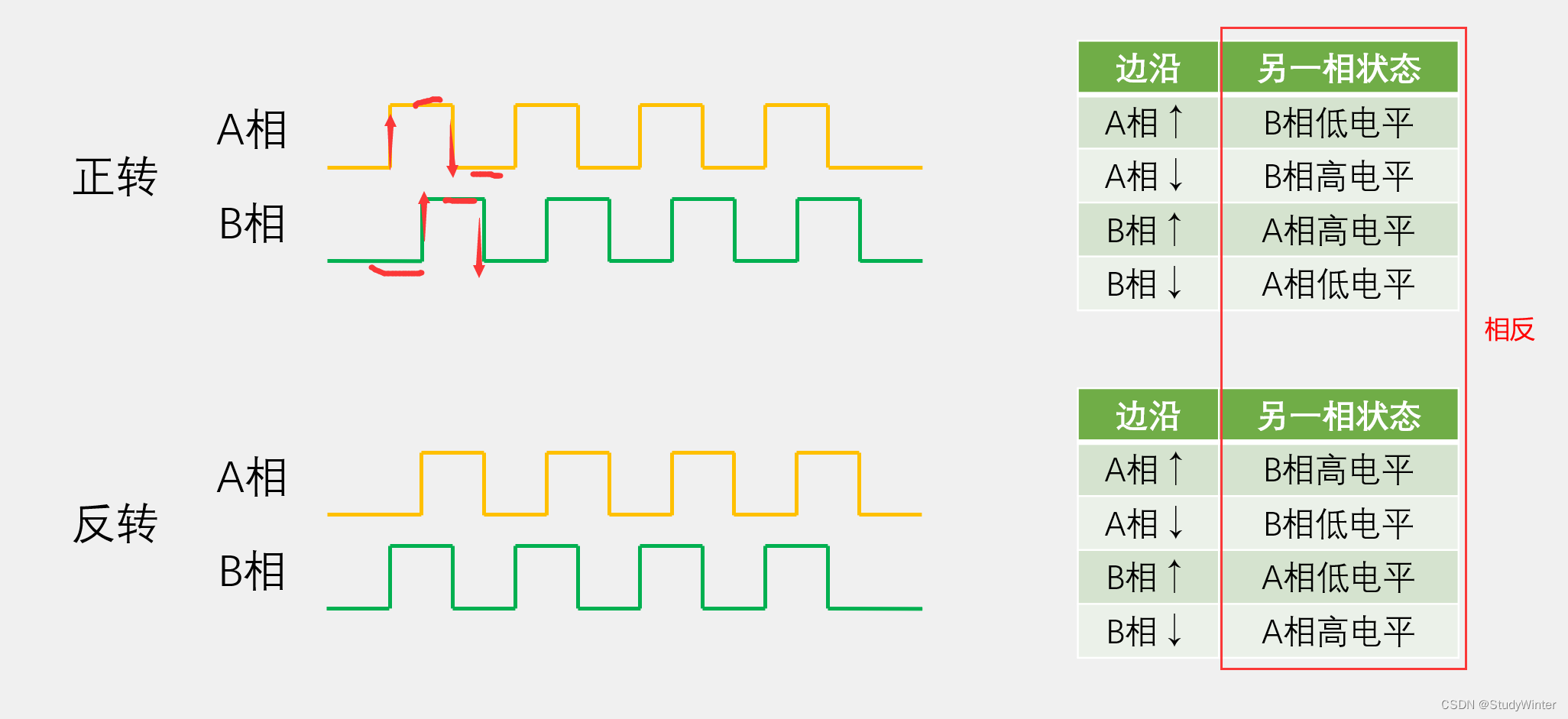
方波频率代表速度。正转时A相提前B相90°;反转时A相滞后B相90°
首先把A\相和B相的所有边沿作为计数器的计数时钟,出现边沿信号时就计数器自增或者自减;计数的方向由另一相的状态来确定。当出现某个边沿时,判断另一相高低电平,如果另一相的状态出现在上面这个表中,那就是正转,计数自增;否则就是反转,计数自减。这样就可以实现编码器接口的功能了。
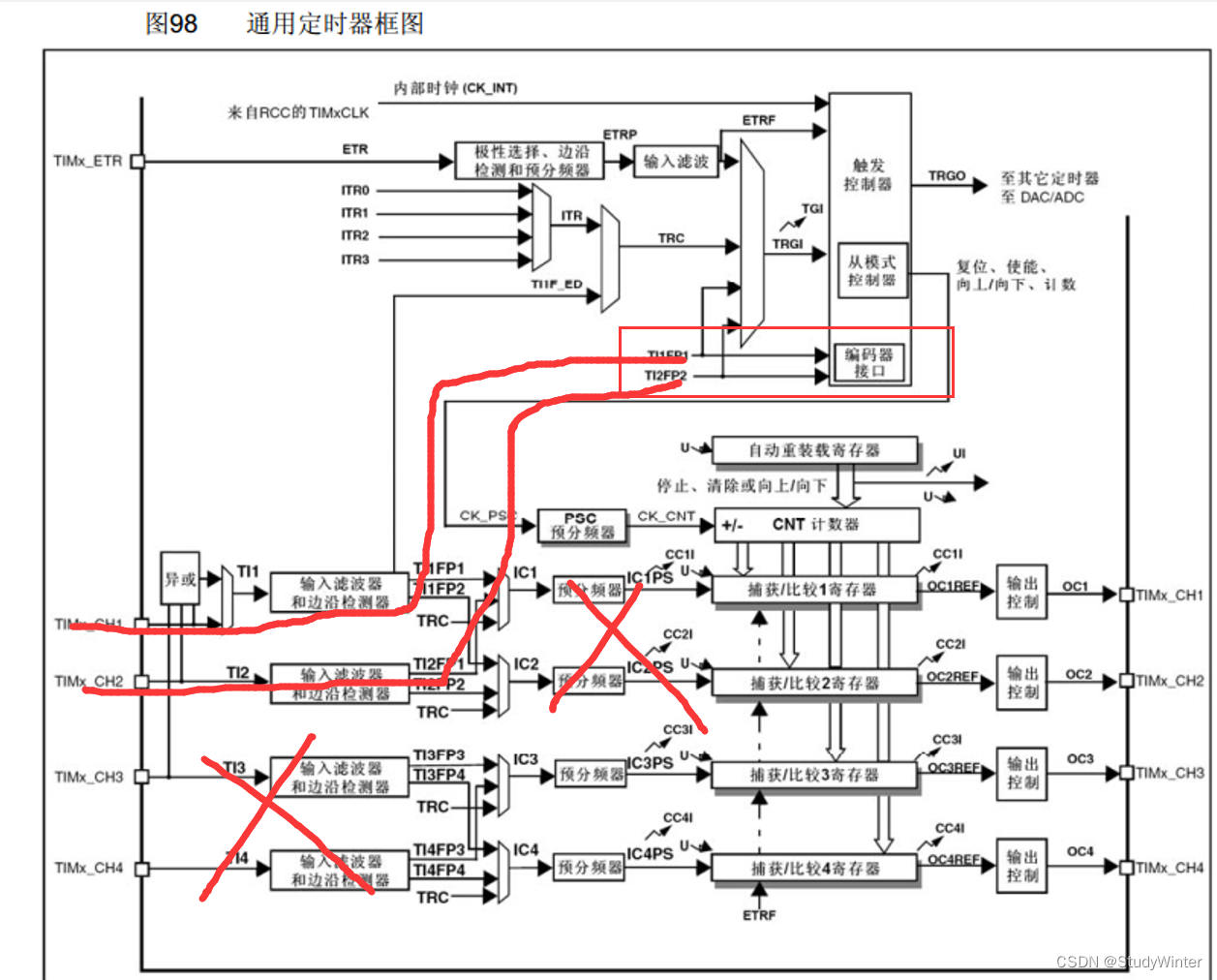
编码器接口有两个输入端,分别接到编码器的A相和B相,所以编码器的输入引脚就是定时器的CH1和CH2引脚。编码器的输出部分相当于从模式的控制器了,控制CNT的计数时钟和计数方向。计数器的自增和自减受编码器控制。
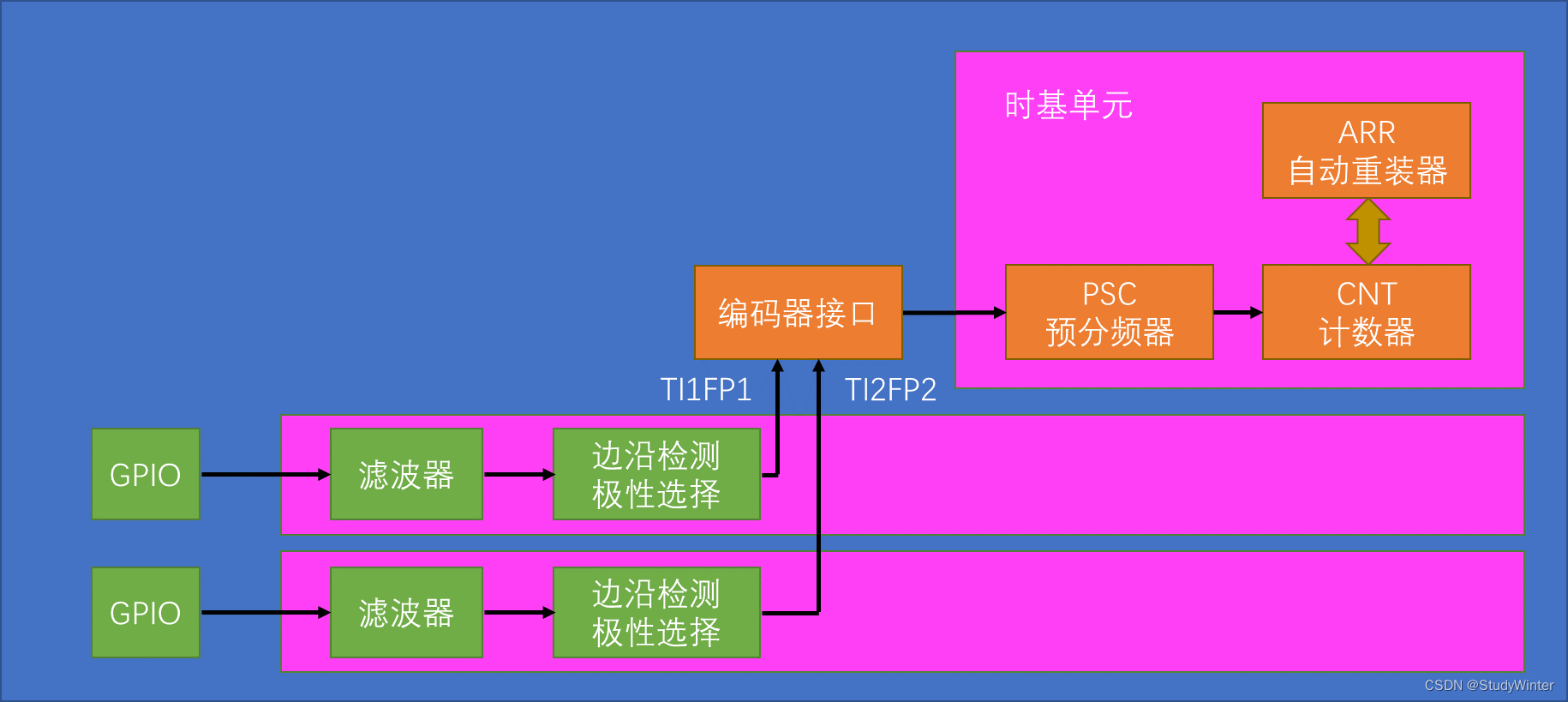
1.2 编码器接口基本结构
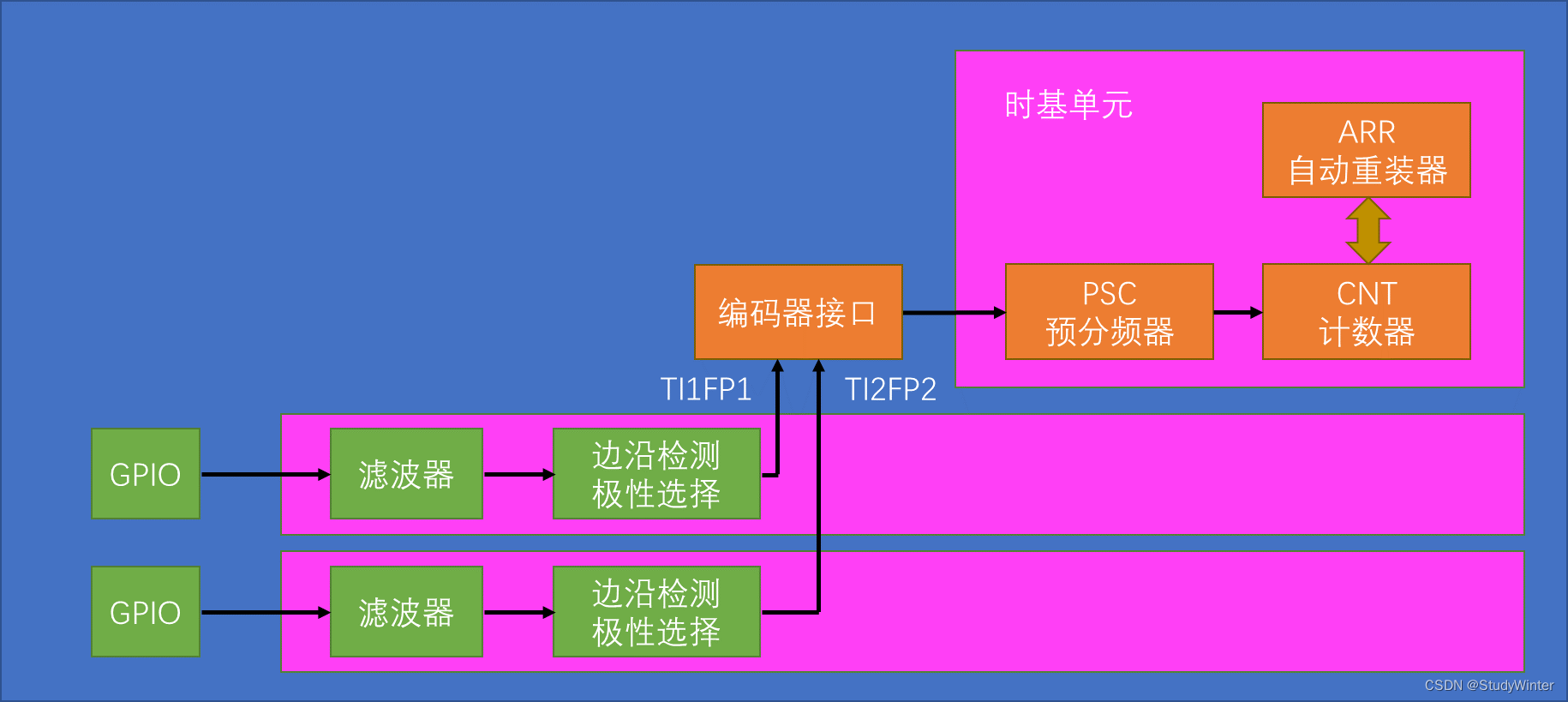
很清晰
1.3 工作模式

这里TI1FP1和TI2FP2接的就是AB相。计数和前面一样。

正转向上计数,反转向下计数。
1.4 实例图
均不反向,使用TI1和TI2都计数

很清晰。
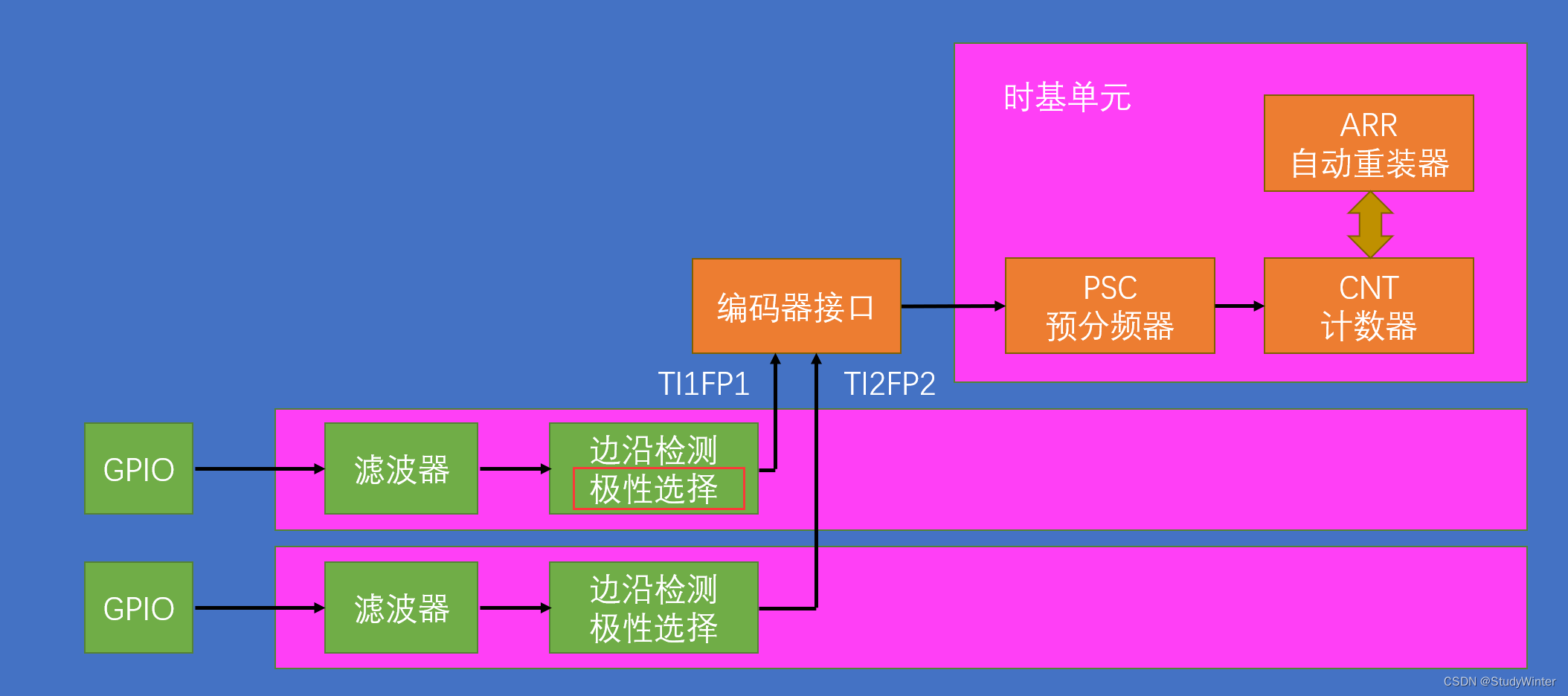
TI1反向,TI2不反向。极性的变化对计数的影响。
这里的极性选择就是高低电平的极性选择了。如果选择上升沿的参数,就是信号直通过来,高低电平极性不反转;如果选择下降沿的参数,就是信号通过非门,高低电平反转。

很清晰。
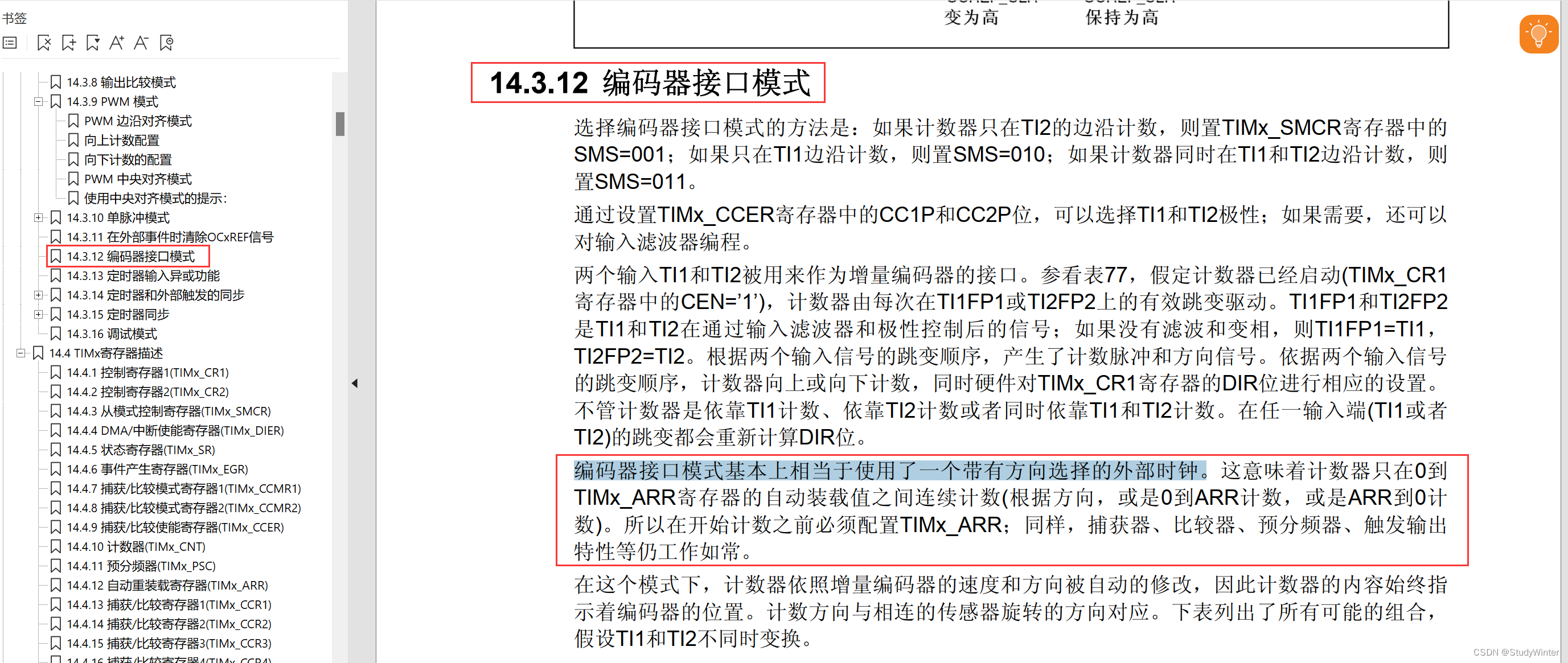
手册
2 编码器接口测速
2.1 接线图
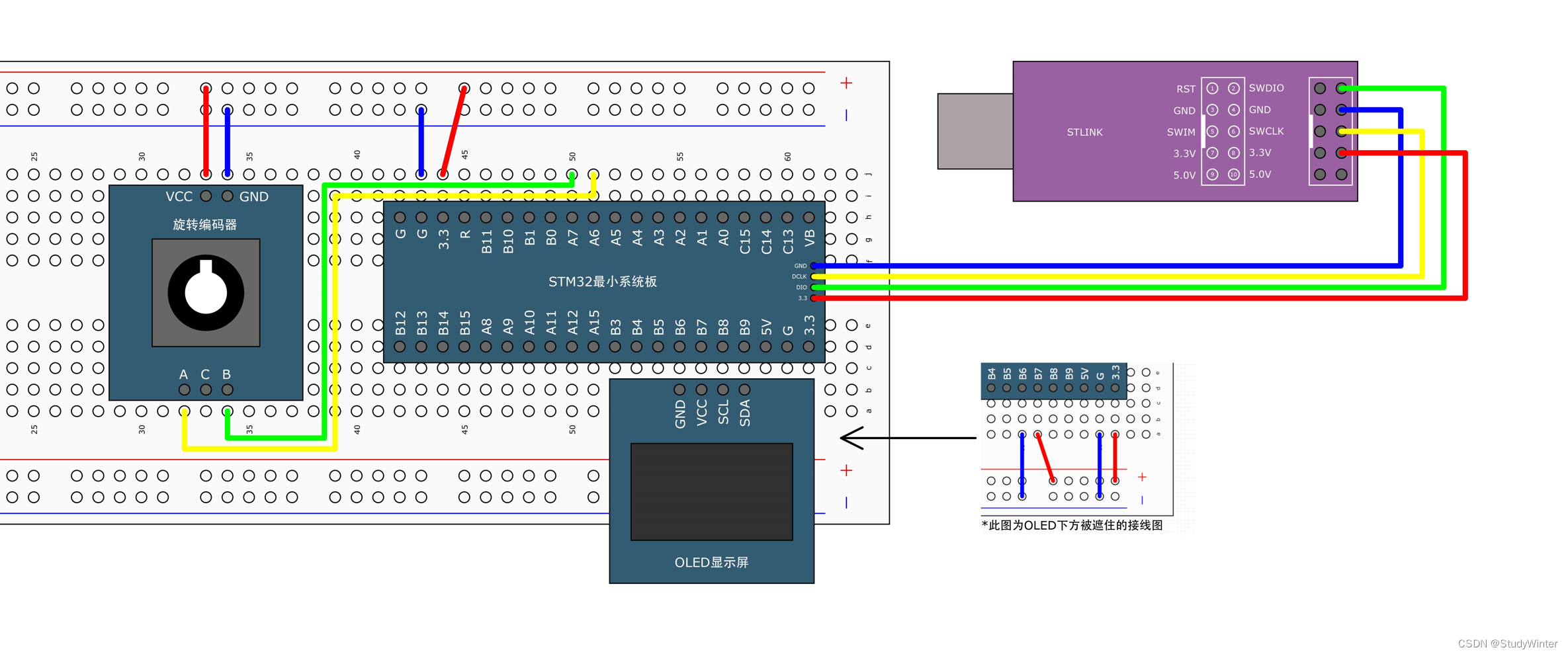
引脚定义

计划用TIM3的通道1和通道2
2.2 模块封装
按这个配置
库函数
// 定时器编码器接口配置
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);版本一:Encoder.c
#include "stm32f10x.h" // Device header// 编码器接口初始化函数
void EnCoder_Init(void)
{// 1开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 2配置GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 3配置时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 1 - 1; // PSC预分频器的值,不分频TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1; // ARR自动重装器的值 TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数,没有用TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; // 重复计数器的值TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);// 4配置输入捕获单元(只有极性和滤波器两个参数有用)TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICStructInit(&TIM_ICInitStruct); // 结构体初始化TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // 通道1TIM_ICInitStruct.TIM_ICFilter = 0xF; // 滤波器
// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复
// TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; // 无作用
// TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 无作用TIM_ICInit(TIM3, &TIM_ICInitStruct);TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;TIM_ICInitStruct.TIM_ICFilter = 0xF;// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复TIM_ICInit(TIM3, &TIM_ICInitStruct);// 5配置编码器接口模式// TIM_ICPolarity_Rising这个通道不反向,TIM_ICPolarity_Falling这个通道反向// 后两个参数相反就是方向相反TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);// 6启动定时器TIM_Cmd(TIM3, ENABLE);
}// 获取CNT的值
int16_t Encoder_Get(void)
{return TIM_GetCounter(TIM3);
}版本二:Encoder.c
#include "stm32f10x.h" // Device header// 编码器接口初始化函数
void EnCoder_Init(void)
{// 1开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 2配置GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 3配置时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 1 - 1; // PSC预分频器的值,不分频TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1; // ARR自动重装器的值 TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数,没有用TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; // 重复计数器的值TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);// 4配置输入捕获单元(只有极性和滤波器两个参数有用)TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICStructInit(&TIM_ICInitStruct); // 结构体初始化TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // 通道1TIM_ICInitStruct.TIM_ICFilter = 0xF; // 滤波器
// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复
// TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; // 无作用
// TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 无作用TIM_ICInit(TIM3, &TIM_ICInitStruct);TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;TIM_ICInitStruct.TIM_ICFilter = 0xF;// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复TIM_ICInit(TIM3, &TIM_ICInitStruct);// 5配置编码器接口模式// TIM_ICPolarity_Rising这个通道不反向,TIM_ICPolarity_Falling这个通道反向// 后两个参数相反就是方向相反TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);// 6启动定时器TIM_Cmd(TIM3, ENABLE);
}// 获取CNT的值
int16_t Encoder_Get(void)
{
// return TIM_GetCounter(TIM3);// 读取cnt,把cnt清零的逻辑int16_t temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);return temp;
}2.3 主函数
版本一:主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "EnCoder.h"int main()
{OLED_Init(); // 初始化OLEDEnCoder_Init();
// Timer_Init(); // 初始化定时器OLED_ShowString(1, 1, "CNT:"); // 显示字符串while (1){OLED_ShowNum(1, 5, Encoder_Get(), 5); // 显示CNT计数器}
}版本二:主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "EnCoder.h"int16_t speed;int main()
{OLED_Init(); // 初始化OLEDEnCoder_Init();Timer_Init(); // 初始化定时器OLED_ShowString(1, 1, "speed:"); // 显示字符串while (1){OLED_ShowSignedNum(1, 7, speed, 5); // 显示CNT计数器}
}// 中断函数
void TIM2_IRQHandler(void)
{// 检测中断标志位,确保是设置的中断源触发的这个函数if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){// 中断处理speed = Encoder_Get();// 清除中断标志TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}