stm32平衡小车--(1)JGB-520减速电机+tb6612(附测试代码)
1、JGB-520编码器减速直流电机
编码器
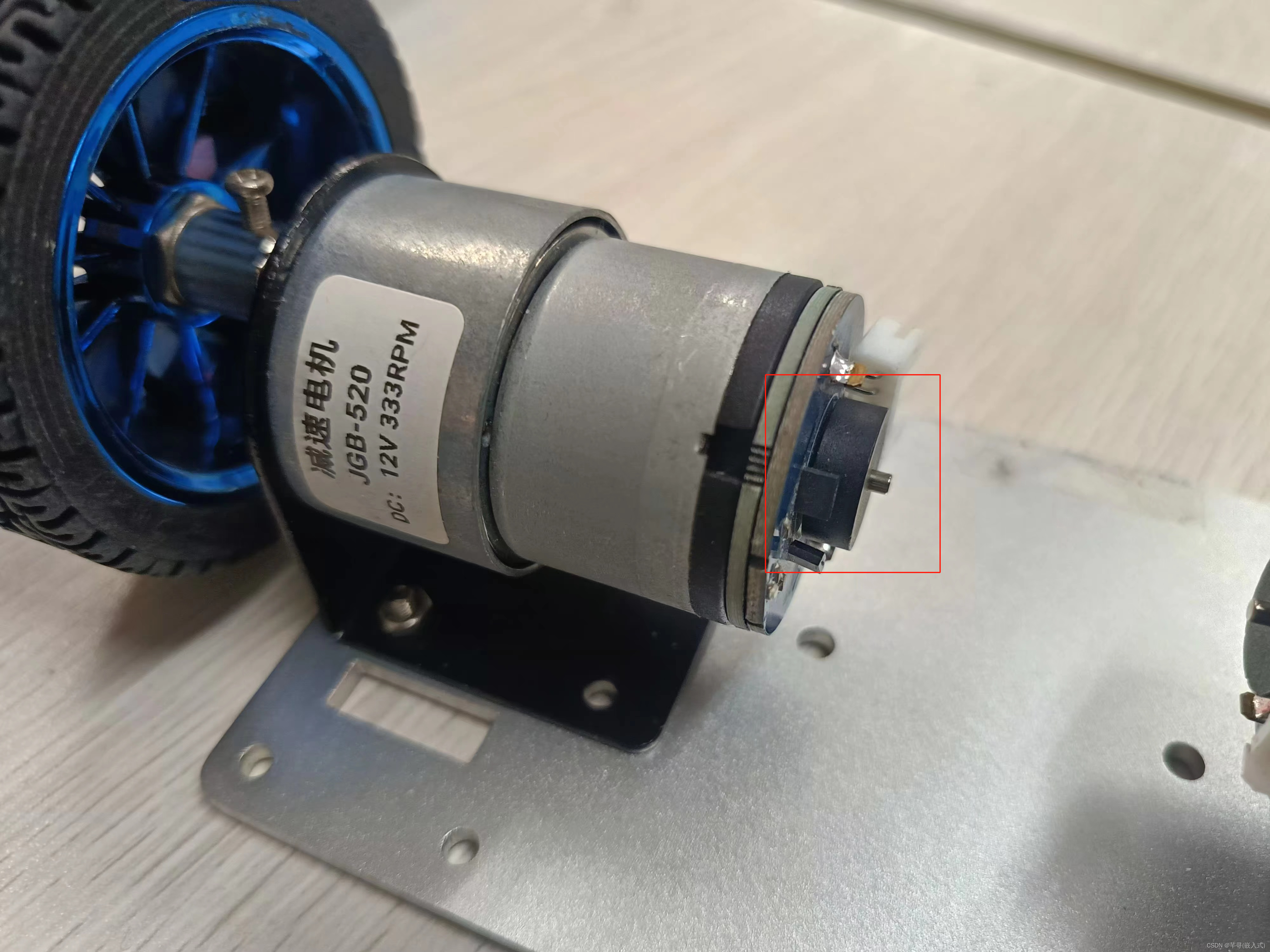
这是我用的电机,红色框框中的就是编码器。
编码器是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。
增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
这是官方给出的,但我们只需要知道这个编码器可以通过电机的转动产生一定的脉冲,从而通过脉冲测出电机的转速和转动方向。后面我们会介绍这个。
JGB-520电机
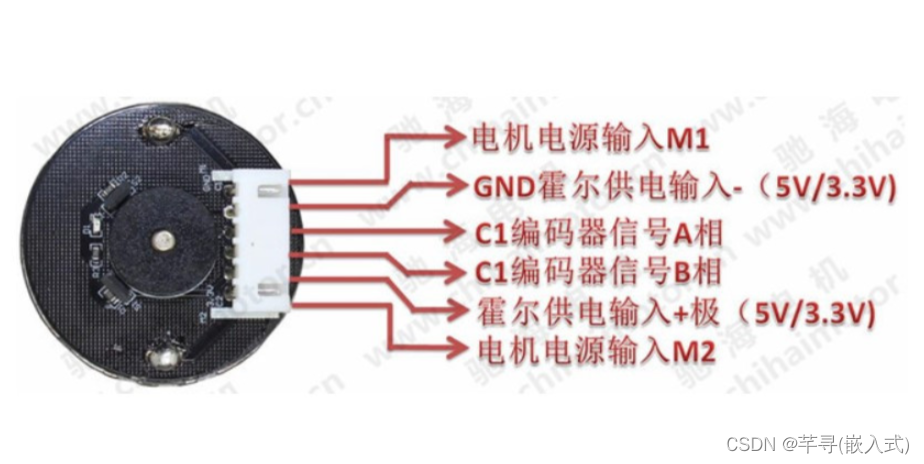
这种电机一般有6个引脚,有的引脚会与图中顺序不同(我的就是┭┮﹏┭┮)但只要连线正确就行。
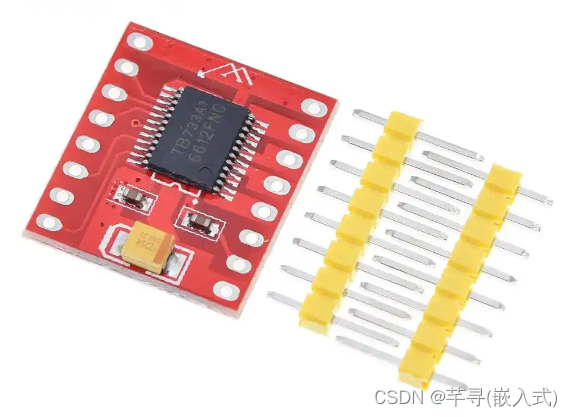
这么大一个电机,我们要怎么让它动起来呢?没错,我们肯定需要一个驱动模块——tb6612
2、tb6612电机驱动模块
就是长这个样子:
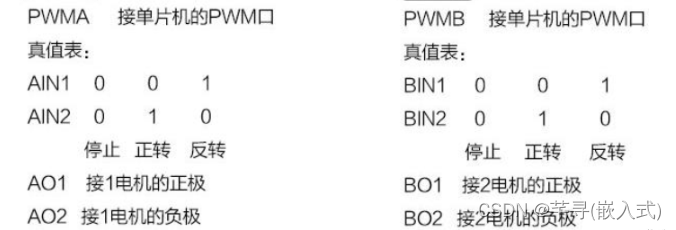
这是它的引脚:

3、电机的驱动
tb6612和电机的连接
TB6612 | C8T6 |
|---|---|
| STBY | 高电平(+3.3V) |
| AIN1 | A电机输入端1(接板子) |
| AIN2 | A电机输入端2(接板子) |
PWMA | A电机控制信号输入端(PWM输入) |
| AO1 | A电机电源M+ |
| AO2 | A电机电源M- |
| VM | 12V |
| VCC | 3.3V |
| GND | 和单片机共地 |
这是一个电机的引脚连接,另一个电机与此类似。如果只用于电机驱动而不用测速的话,只用接电机的M+和M-即可。
当AIN或BIN产生电势差,电机就会转动。
4、转速的测量
如果我们要让我们的平衡车真的实现平衡,就肯定需要使用PWM驱动电机,然后再使用编码器测量速度,再使用PID算法进行闭环控制。
原理:
接收编码器的A、B相产生的正交信号,根据编码器产生的正交信号脉冲,自动控制CNT自增或自减,根据计数方向和编码器的信号关系来指示编码器的位置、旋转方向和旋转速度,利用脉冲值来计算电机的转动位移
大概就是编码器上会有两个用来产生脉冲的东西,电机每转动一圈,他们会产生相差九十度的相同数量的脉冲,然后会有一个计数器去捕获脉冲的上升沿和下降沿,然后每隔一段时间去读取计数器的值(转动的圈数=计数器的数值/一圈产生的脉冲数),这样就能算出这一段时间转了多少圈,从而算出转速。
定时器的编码器接口模式
可以用来捕获上升沿和下降沿并计数。(Stm32中的定时器只有TIM1-5和TIM8才有编码器接口功能,而且只有CH1通道和CH2通道有用)。
4倍频计数:
采用的是编码器模式3,在TI1和TI2边沿都计数,也就是在一个周期内对A相和B相的上升沿下降沿都计数,一个周期内计4次,所以采用这种模式后,相应的计数值(CNT)就会变成4倍。
线数:
电机转动一圈产生的脉冲数就是线数。比如我的电机线束是30,那么我的电机转一圈就会产生30个脉冲。
5、相关代码的配置
电机的驱动代码如下:
这个没有什么好讲的,大家应该都能看懂。
//moto1,moto2 左轮PWM、右轮PWM
void Set_Pwm(int moto1,int moto2)
{if(moto1<0) AIN2=1, AIN1=0;else AIN2=0, AIN1=1;PWMA=myabs(moto1);if(moto2<0) BIN1=1, BIN2=0;else BIN1=0, BIN2=1;PWMB=myabs(moto2);
}int myabs(int a)
{ int temp;if(a<0) temp=-a; else temp=a;return temp;
}测速代码:
我左右轮分别使用的TIM2和TIM3,这段代码就是读取计数器的值。
/**************************************************************************
函数功能:单位时间读取编码器计数
入口参数:定时器
返回 值:速度值
**************************************************************************/
int Read_Encoder(u8 TIMX)
{int Encoder_TIM; switch(TIMX){case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0;break; default: Encoder_TIM=1;}return Encoder_TIM;
}PWM的配置
Motor_PWM_Init(7199,0);//不分频,初始化PWM 10KHZ,驱动电机编码器模式的配置
预分频(psc)一般就为‘0’就好;
重装载值(arr)我这里配置的重装载值为65535,是最大值。这样定时器不会溢出,方便计算。也可以使用别的重装载值:
比如我的电机线数为30,即一圈产生30个脉冲,那么我如果使用编码器模式3的4倍频计数,那么转一圈会计数器值为30*4,如果我设置重装载值为120,那是不是电机每转一圈定时器就会溢出一次,我们再在定时器的溢出中断中加上一个计数器cnt,每次进中断,cnt的值就++,那在采样的时候计数器的值就为:cnt*重装载值+计数器的值
#define ENCODER_TIM_PERIOD (u16)(65535) //103的定时器是16位 2的16次方最大是65536TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器 TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数 6、硬件连接
电机A
M+——AO1
M- ——AO2
A ——PA6
B ——PA7
VCC——3.3V
GND——GND
电机B
M+——BO1
M- ——BO2
A ——PA0
B ——PA1
VCC——3.3V
GND——GND
tb6612
VM——12V
VCC——3.3V
GND——GND
PWMA——PA8
AIN2——PB15
AIN1——PB14
STBY——3.3V
BIN1——PB13
BIN2——PB12
PWMB——PA11
7、完整代码
main.c
#include "stdio.h"
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "motor_pwm.h"
#include "encoder.h"int main(void){
// u16 led0pwmval=0;
// u8 dir=1; uart_init(9600); //串口1初始化delay_init(); //延时函数初始化 LED_Init(); //初始化与LED连接的硬件接口NVIC_Configuration(); //中断优先级Motor_Init(); //Motor_PWM_Init(7199,0);//不分频,初始化PWM 10KHZ,驱动电机Encoder_Init_TIM2();//TIM2初始化为编码器接口模式Encoder_Init_TIM3();//TIM3初始化为编码器接口模式while(1){
// if(dir)led0pwmval++;
// else led0pwmval--;
// if(led0pwmval>300)dir=0;
// if(led0pwmval==0)dir=1;
// TIM_SetCompare1(TIM1,led0pwmval);Set_Pwm(6000,7000);printf("%d\t",Read_Encoder(2));printf("%d",Read_Encoder(3));printf("\r\n");delay_ms(1000);Set_Pwm(-5000,-4000);printf("%d\t",Read_Encoder(2));printf("%d",Read_Encoder(3));printf("\r\n");delay_ms(1000);}
}encoder.c
#include "encoder.h"void Encoder_Init_TIM2(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM_ICInitStructure; GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定时器4的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1; //端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOBTIM_TimeBaseStructInit(&TIM_TimeBaseStructure);TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器 TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 10;TIM_ICInit(TIM2, &TIM_ICInitStructure);TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//Reset counterTIM_SetCounter(TIM2,0);TIM_Cmd(TIM2, ENABLE);
}
/**************************************************************************
函数功能:把TIM3初始化为编码器接口模式
入口参数:无
返回 值:无
**************************************************************************/
void Encoder_Init_TIM3(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_ICInitTypeDef TIM_ICInitStructure; GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//使能定时器4的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOBTIM_TimeBaseStructInit(&TIM_TimeBaseStructure);TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器 TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3TIM_ICStructInit(&TIM_ICInitStructure);TIM_ICInitStructure.TIM_ICFilter = 10;TIM_ICInit(TIM3, &TIM_ICInitStructure);TIM_ClearFlag(TIM3, TIM_FLAG_Update);//清除TIM的更新标志位TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);//Reset counterTIM_SetCounter(TIM3,0);TIM_Cmd(TIM3, ENABLE);
}/**************************************************************************
函数功能:单位时间读取编码器计数
入口参数:定时器
返回 值:速度值
**************************************************************************/
int Read_Encoder(u8 TIMX)
{int Encoder_TIM; switch(TIMX){case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;case 3: Encoder_TIM= (short)TIM3 -> CNT; TIM3 -> CNT=0;break; default: Encoder_TIM=1;}return Encoder_TIM;
}encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include <sys.h> #define ENCODER_TIM_PERIOD (u16)(65535) //103的定时器是16位 2的16次方最大是65536void Encoder_Init_TIM2(void);
void Encoder_Init_TIM3(void);
int Read_Encoder(u8 TIMX);
#endif
motor_pwm.c
#include "motor_pwm.h"
#include "led.h"//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void Motor_Init(void) //IN引脚初始化
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; //端口配置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //50MHZGPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB AIN1=0,AIN2=0;BIN1=0,BIN1=0;
}
void Motor_PWM_Init(u16 arr,u16 psc) //PWM引脚初始化
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);// RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE); //使能GPIO外设时钟使能//设置该引脚为复用输出功能,输出TIM1 CH1 CH4的PWM脉冲波形GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11; //TIM_CH1 //TIM_CH4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值TIM_OCInitStructure.TIM_Pulse = arr >> 1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC1Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_OC4Init(TIM1, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能 TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH1预装载使能 TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable); //CH4预装载使能 TIM_ARRPreloadConfig(TIM1, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM1, ENABLE); //使能TIM1
}
//moto1,moto2 左轮PWM、右轮PWM
void Set_Pwm(int moto1,int moto2)
{if(moto1<0) AIN2=1, AIN1=0;else AIN2=0, AIN1=1;PWMA=myabs(moto1);if(moto2<0) BIN1=1, BIN2=0;else BIN1=0, BIN2=1;PWMB=myabs(moto2);
}int myabs(int a)
{ int temp;if(a<0) temp=-a; else temp=a;return temp;
}
motor_pwm.h
#ifndef __PWM_H
#define __PWM_H
#include "sys.h" #define PWMA TIM1->CCR1 //PA8 PWMA TIM1_CH1
#define AIN2 PBout(15)
#define AIN1 PBout(14)#define PWMB TIM1->CCR4 //PA11 PWMB TIM1_CH4
#define BIN1 PBout(13)
#define BIN2 PBout(12)void Motor_Init(void);
void Motor_PWM_Init(u16 arr,u16 psc);
int myabs(int a);
void Set_Pwm(int moto1,int moto2);#endif