BEV和OCC学习-3:mmdet3d 坐标系
目录
坐标系
转向角 (yaw) 的定义
框尺寸的定义
与支持的数据集的原始坐标系的关系
KITTI
Waymo
NuScenes
Lyft
ScanNet
SUN RGB-D
S3DIS
坐标系
坐标系 — MMDetection3D 1.4.0 文档https://mmdetection3d.readthedocs.io/zh-cn/latest/user_guides/coord_sys_tutorial.html
- 相机坐标系 – 大多数相机的坐标系,在该坐标系中 y 轴正方向指向地面,x 轴正方向指向右侧,z 轴正方向指向前方。
- 激光雷达坐标系 – 众多激光雷达的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向前方,y 轴正方向指向左侧。
- 深度坐标系 – VoteNet、H3DNet 等模型使用的坐标系,在该坐标系中 z 轴负方向指向地面,x 轴正方向指向右侧,y 轴正方向指向前方。
三个坐标系的图示如下:
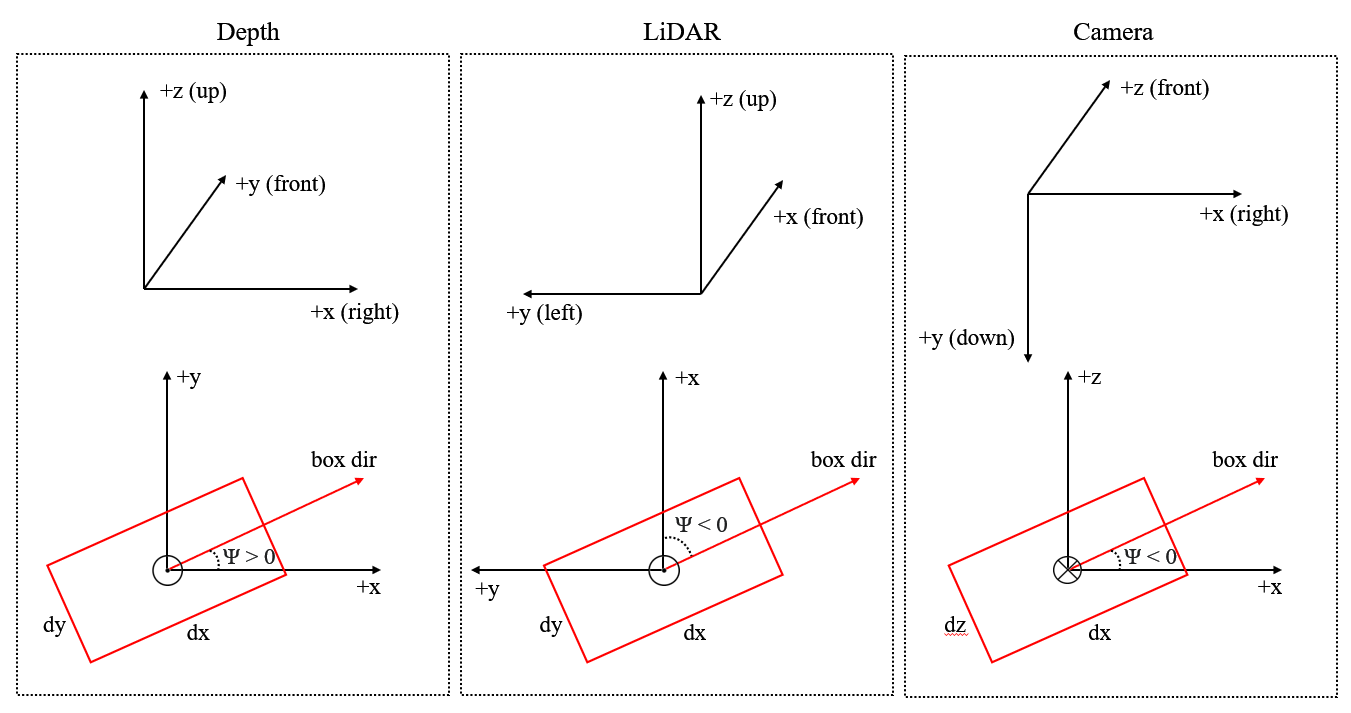
上面三张图是 3D 坐标系,下面三张图是鸟瞰图。以后我们将坚持使用本教程中定义的三个坐标系。
转向角 (yaw) 的定义
在目标检测中,我们选择一个轴作为重力轴,并在垂直于重力轴的平面 $\Pi$ 上选取一个参考方向,那么参考方向的转向角为 0,在上的其他方向有非零的转向角,其角度取决于其与参考方向的角度。目前,对于所有支持的数据集,标注不包括俯仰角 (pitch) 和滚动角 (roll),这意味着我们在预测框和计算框之间的重叠时只需考虑转向角 (yaw)。
在 MMDetection3D 中,所有坐标系都是右手坐标系,这意味着如果从重力轴的负方向(轴的正方向指向人眼)看,转向角 (yaw) 沿着逆时针方向增加。
下图显示,在右手坐标系中,如果我们设定 x 轴正方向为参考方向,那么 y 轴正方向的转向角 (yaw) 为。
z 上 y 前 (yaw=0.5*pi)^ ^| /| /| /|/ 左 (yaw=pi) ------ 0 ------> x 右 (yaw=0)
对于一个框来说,其转向角 (yaw) 的值等于其方向减去一个参考方向。在 MMDetection3D 的所有三个坐标系中,参考方向总是 x 轴的正方向,而如果一个框的转向角 (yaw) 为 0,则其方向被定义为与 x 轴平行。框的转向角 (yaw) 的定义如下图所示。
y 前^ 框的方向 (yaw=0.5*pi)/|\ ^| /|\| ____|____| | | || | | | __|____|____|____|______\ x 右| | | | /| | | || |____|____||
框尺寸的定义
框尺寸的定义与转向角 (yaw) 的定义是分不开的。在上一节中,我们提到如果一个框的转向角 (yaw) 为 0,它的方向就被定义为与 x 轴平行。那么自然地,一个框对应于 x 轴的尺寸应该是 $dx$。但是,这在某些数据集中并非总是如此(我们稍后会解决这个问题)。
下图展示了 x 轴和,y 轴和
对应的含义。
y 前^ 框的方向 (yaw=0.5*pi)/|\ ^| /|\| ____|____| | | || | | | dx __|____|____|____|______\ x 右| | | | /| | | || |____|____|| dy
注意框的方向总是和 边平行。
y 前^ _________/|\ | | || | | || | | | dy| |____|____|____\ 框的方向 (yaw=0)| | | | / __|____|____|____|_________\ x 右| | | | /| |____|____|| dx|
与支持的数据集的原始坐标系的关系
KITTI
KITTI数据集的原始标注是在相机坐标系下的,详见 get_label_anno。在 MMDetection3D 中,为了在 KITTI 数据集上训练基于激光雷达的模型,首先将数据从相机坐标系转换到激光雷达坐标,详见 get_ann_info。对于训练基于视觉的模型,数据保持在相机坐标系不变。
在 SECOND 中,框的激光雷达坐标系定义如下(鸟瞰图):
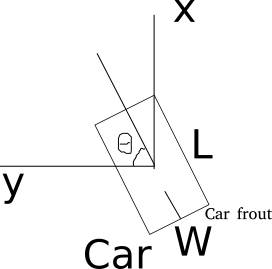
对于每个框来说,尺寸为 $(w, l, h)$,转向角 (yaw) 的参考方向为 y 轴正方向。更多细节请参考代码库。
我们的激光雷达坐标系有两处改变:
-
转向角 (yaw) 被定义为右手而非左手,从而保持一致性;
-
框的尺寸为 $(l, w, h)$ 而非 $(w, l, h)$,由于在 KITTI 数据集中 $w$ 对应 $dy$,$l$ 对应 $dx$。
Waymo
我们使用 Waymo 数据集的 KITTI 格式数据。因此,在我们的实现中 KITTI 和 Waymo 也共用相同的坐标系。
NuScenes
NuScenes 提供了一个评估工具包,其中每个框都被包装成一个 Box 实例。Box 的坐标系不同于我们的激光雷达坐标系,在 Box 坐标系中,前两个表示框尺寸的元素分别对应 $(dy, dx)$ 或者 $(w, l)$,和我们的表示方法相反。更多细节请参考 NuScenes 教程。读者可以参考 NuScenes 开发工具,了解 NuScenes 框 的定义和 NuScenes 评估的过程。
Lyft
就涉及坐标系而言,Lyft 和 NuScenes 共用相同的数据格式。请参考官方网站获取更多信息。
ScanNet
ScanNet 的原始数据不是点云而是网格,需要在我们的深度坐标系下进行采样得到点云数据。对于 ScanNet 检测任务,框的标注是轴对齐的,并且转向角 (yaw) 始终是 0。因此,我们的深度坐标系中转向角 (yaw) 的方向对 ScanNet 没有影响。
SUN RGB-D
SUN RGB-D 的原始数据不是点云而是 RGB-D 图像。我们通过反投影,可以得到每张图像对应的点云,其在我们的深度坐标系下。但是,数据集的标注并不在我们的系统中,所以需要进行转换。
将原始标注转换为我们的深度坐标系下的标注的转换过程请参考 sunrgbd_data_utils.py。
S3DIS
在我们的实现中,S3DIS 与 ScanNet 共用相同的坐标系。然而 S3DIS 是一个仅限于分割任务的数据集,因此没有标注是坐标系敏感的。