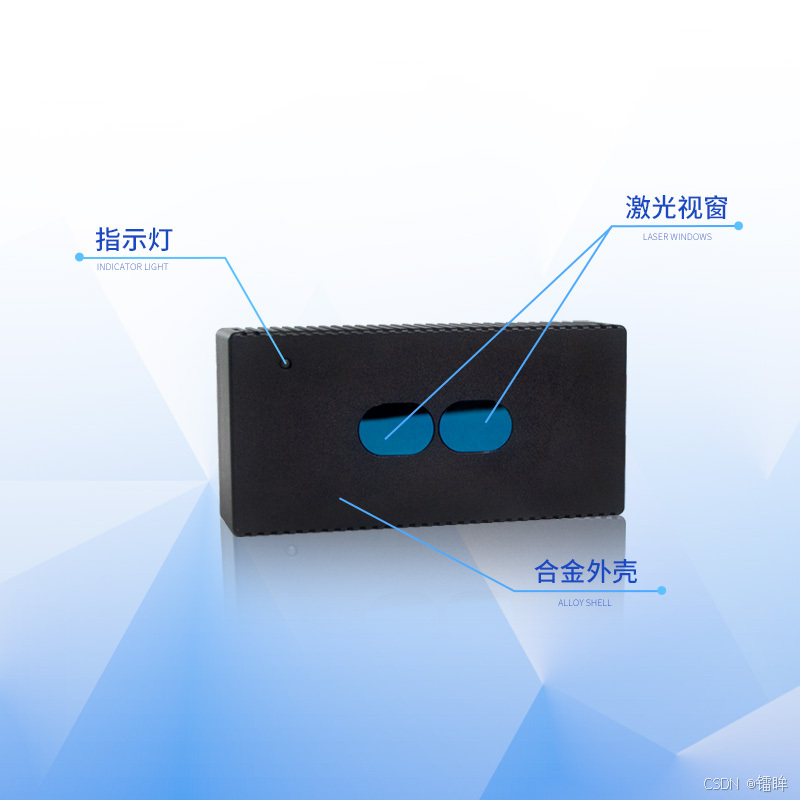
因泰立科技:镭眸T51激光雷达,打造智能门控新生态
在高端门控行业,安全与效率是永恒的追求。如今,随着科技的飞速发展,激光雷达与TOF相机技术的融合,为门控系统带来了前所未有的智能感知能力,开启了精准守护的新时代。因泰立科技的镭眸T51激光雷达,作为这一领域的佼佼者,凭借其卓越的性能和创新的技术,为自动卷帘门、医疗自动门、旋转门和悬浮门等多种门控系统提供了全方位的智能解决方案。

激光雷达:三维空间的精准测绘
镭眸T51激光雷达采用先进的激光时间飞行法(TOF)原理,能够实时生成高精度的三维点云图。它通过发射激光脉冲并测量反射光的飞行时间,精确计算出目标物体的距离和位置信息。这种高精度的三维成像技术,使得门控系统能够实时感知周围环境,精确检测到人员和物体的运动状态,从而实现自动避障和安全控制。
关键特性
高精度测量:精度高达±2cm,确保门控系统的精准操作。
实时三维成像:快速生成三维点云图,实时感知环境变化。
抗干扰能力强:在复杂光照条件下也能稳定工作,不受外界干扰。
TOF相机:深度成像与智能识别
TOF相机则以其独特的深度成像技术,为门控系统带来了更智能的识别能力。它通过发射和接收光信号,快速计算出物体的深度信息,生成清晰的深度图像。这使得门控系统能够更准确地识别人员的轮廓和动作,实现无接触的自动开启和关闭,大大提高了通行效率。
关键特性
深度成像:生成高分辨率的深度图像,精确识别人员和物体。
智能识别:支持多种智能算法,实现人员和物体的精准识别。
环境适应性:在各种光照条件下都能稳定工作,确保系统的可靠性。
智能融合,全方位守护
当激光雷达与TOF相机技术相结合,它们的优势得到了充分发挥,为门控系统提供了全方位的智能感知和精准守护。这种融合技术不仅能够实现高精度的三维空间感知和深度成像,还能够通过智能算法对数据进行快速处理和分析,实现更智能的决策和控制。
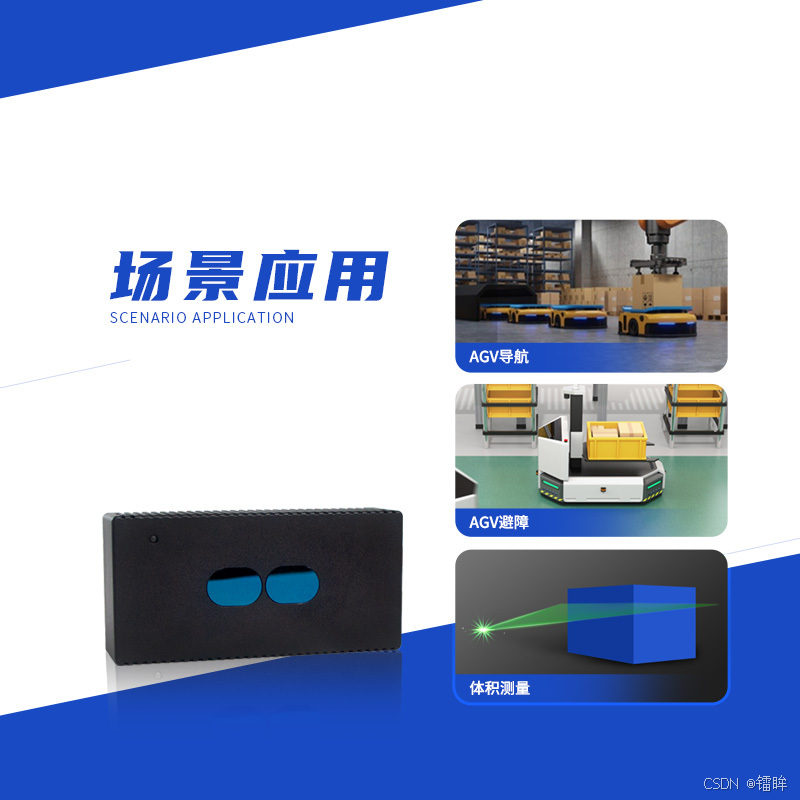
应用场景
快速卷帘门:实现自动快速开启与关闭,同时具备防砸等安全功能。
医疗自动门:无接触开启,有效防止因接触而造成的健康危害。
旋转门:通过信号检测入口区域内的移动物体,实现自动开关门控。
悬浮门:实现门体的自动防撞功能,全方位保障通行的安全与便捷。
因泰立科技:智能感知的先锋
因泰立科技凭借其在激光雷达和TOF相机领域的深厚技术积累,为高端门控行业提供了全方位的智能解决方案。我们的产品不仅提升了门控系统的智能化水平,还为用户带来了更加安全、便捷的通行体验。选择因泰立科技,就是选择一个更加智能、安全、高效的工作和生活环境。
产品优势
高精度与高可靠性:确保门控系统在各种复杂环境下的稳定运行。
智能融合技术:结合激光雷达与TOF相机,实现全方位的智能感知。
定制化解决方案:根据客户需求,提供定制化的传感器产品和解决方案。
因泰立科技镭眸T51激光雷达,智能感知,精准守护。让我们携手因泰立科技,共同迈向智能门控的未来!