qt之开发大恒usb3.0相机三
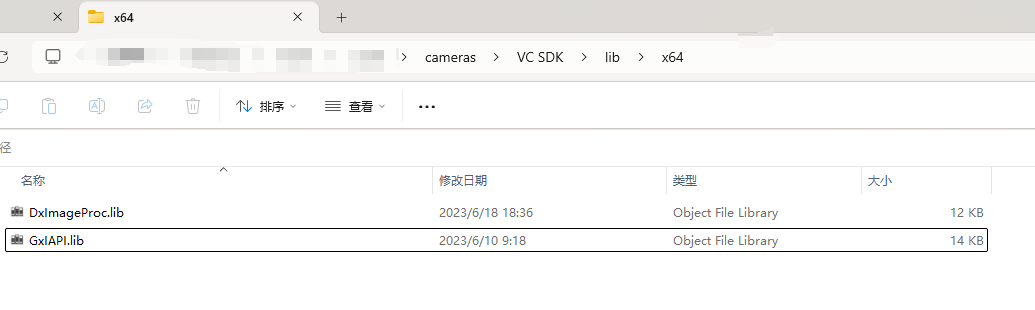
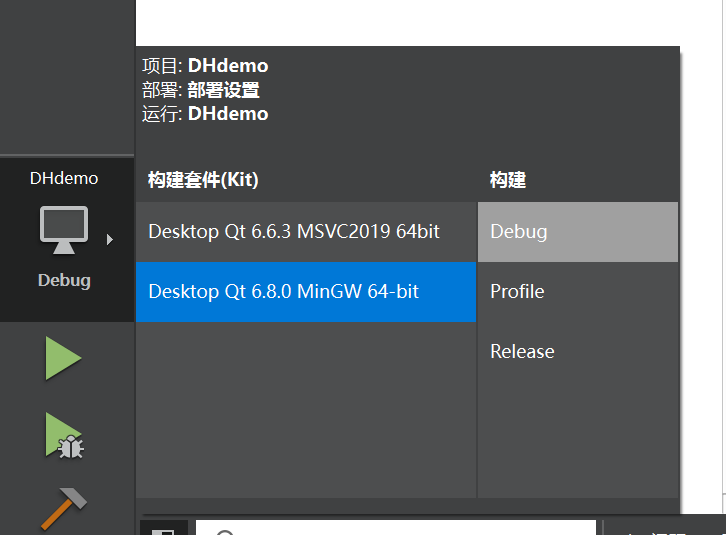
上一篇大恒相机的开发 是基于Qt Creator msvc工具链编译的,大恒相机msvc使用的的lib库是c++版的。如果想要使用mingw工具链开发大恒相机,那么找连接对相应的lib库。mingw对应的库是c的。
配置如下:
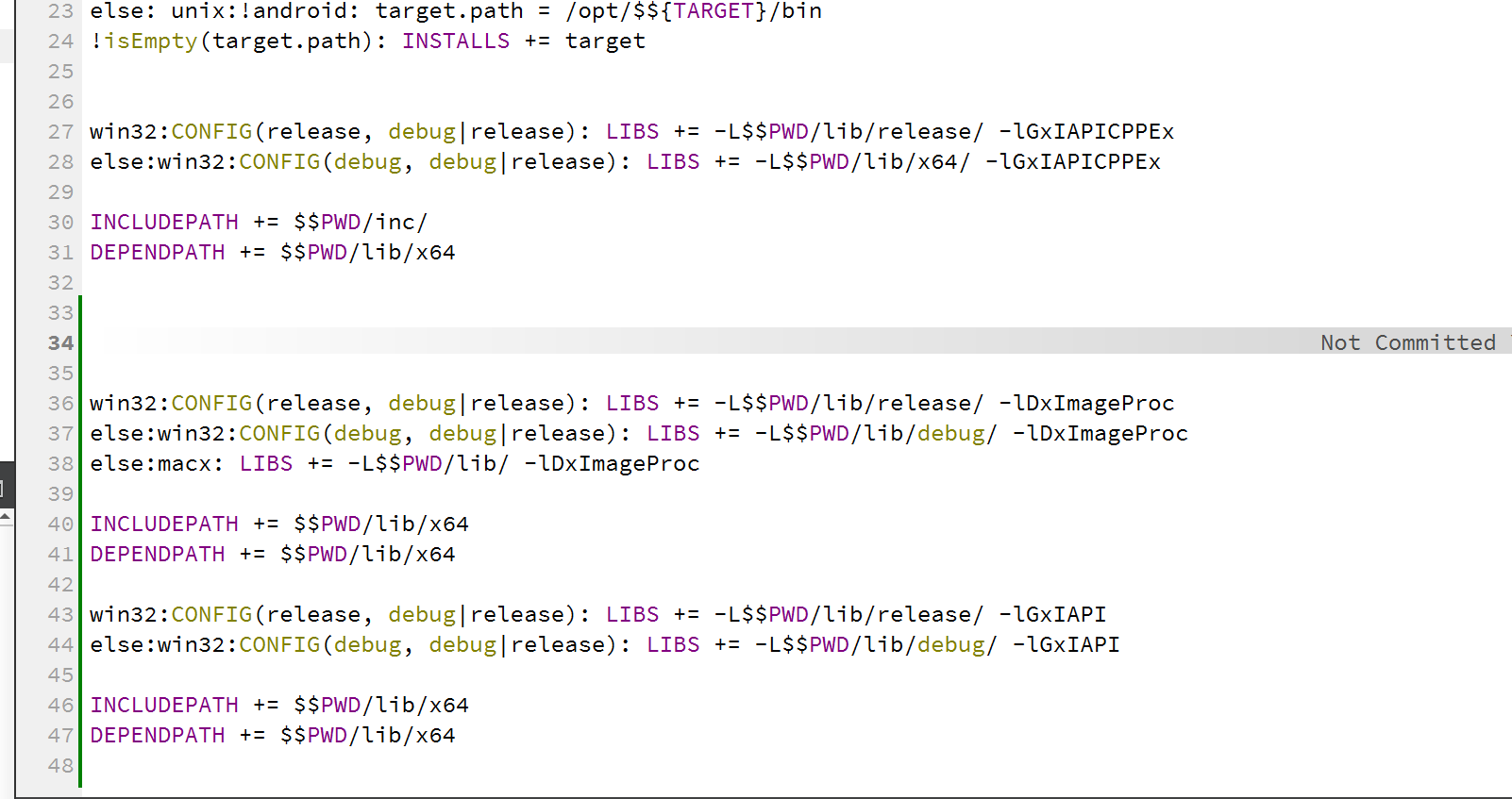
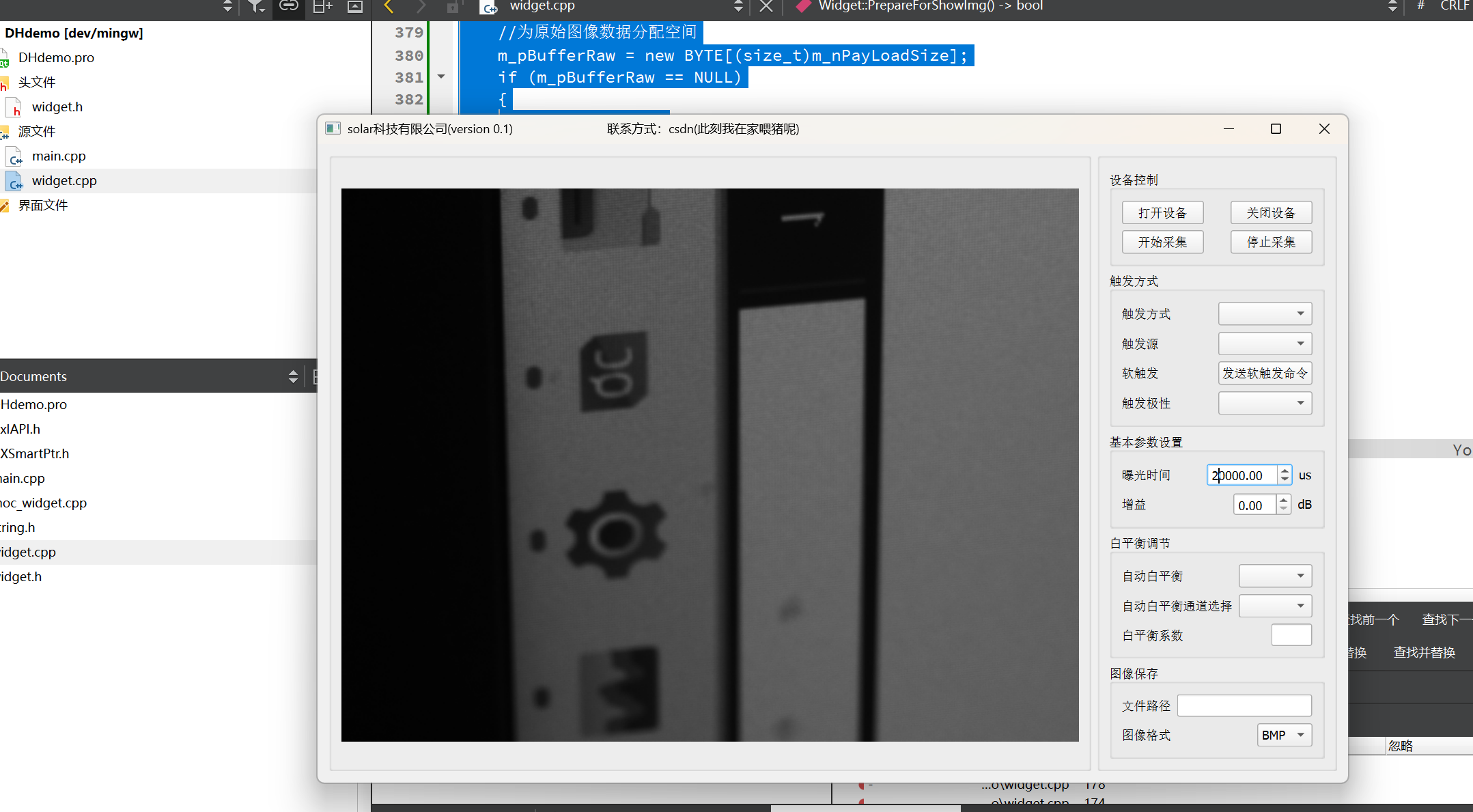
图像获取核心代码如下
void __stdcall Widget::OnFrameCallbackFun(GX_FRAME_CALLBACK_PARAM* pFrame)
{Widget *pDlg = (Widget*)(pFrame->pUserParam);int nImageHeight = pDlg->m_nImageHeight;int nImageWidth = pDlg->m_nImageWidth;if (pFrame->status == 0){memcpy(pDlg->m_pBufferRaw,pFrame->pImgBuf,pFrame->nImgSize);// 黑白相机需要翻转数据后显示for(int i =0;i <nImageHeight;i++){memcpy(pDlg->m_pImageBuffer+i*nImageWidth, pDlg->m_pBufferRaw+(nImageHeight-i-1)*nImageWidth,(size_t)nImageWidth);}//pDlg->DrawImg();// 图像保存处理QImage img(pDlg->m_pImageBuffer,pDlg->m_nImageWidth,pDlg->m_nImageHeight,QImage::Format_Indexed8);emit pDlg->imageReady(img);}
}
bool Widget::PrepareForShowImg()
{//---------------------------------------------------------------------//----------------------初始化bitmap头---------------------------------m_pBmpInfo = (BITMAPINFO *)m_chBmpBuf;m_pBmpInfo->bmiHeader.biSize = sizeof(BITMAPINFOHEADER);m_pBmpInfo->bmiHeader.biWidth = (LONG)m_nImageWidth;m_pBmpInfo->bmiHeader.biHeight = (LONG)m_nImageHeight;m_pBmpInfo->bmiHeader.biPlanes = 1;m_pBmpInfo->bmiHeader.biBitCount = 8; // 黑白图像为8m_pBmpInfo->bmiHeader.biCompression = BI_RGB;m_pBmpInfo->bmiHeader.biSizeImage = 0;m_pBmpInfo->bmiHeader.biXPelsPerMeter = 0;m_pBmpInfo->bmiHeader.biYPelsPerMeter = 0;m_pBmpInfo->bmiHeader.biClrUsed = 0;m_pBmpInfo->bmiHeader.biClrImportant = 0;// 黑白图像需要初始化调色板for(int i=0;i<256;i++){m_pBmpInfo->bmiColors[i].rgbBlue =i;m_pBmpInfo->bmiColors[i].rgbGreen =i;m_pBmpInfo->bmiColors[i].rgbRed =i;m_pBmpInfo->bmiColors[i].rgbReserved=0;}//--------------------------------------------------------------------------//------------------------图像数据Buffer分配---------------------------------//为原始图像数据分配空间m_pBufferRaw = new BYTE[(size_t)m_nPayLoadSize];if (m_pBufferRaw == NULL){return false;}//为经过翻转后的图像数据分配空间m_pImageBuffer = new BYTE[(size_t)(m_nImageWidth * m_nImageHeight)];if (m_pImageBuffer == NULL){delete []m_pBufferRaw;m_pBufferRaw = NULL;return false;}return true;
}
有需要源码的话联系咸鱼号 solar.