自动化立体仓库堆垛机SRM控制系统FC19手动控制功能块开发
1、控制系统手动控制模块HMI屏幕设计如下图
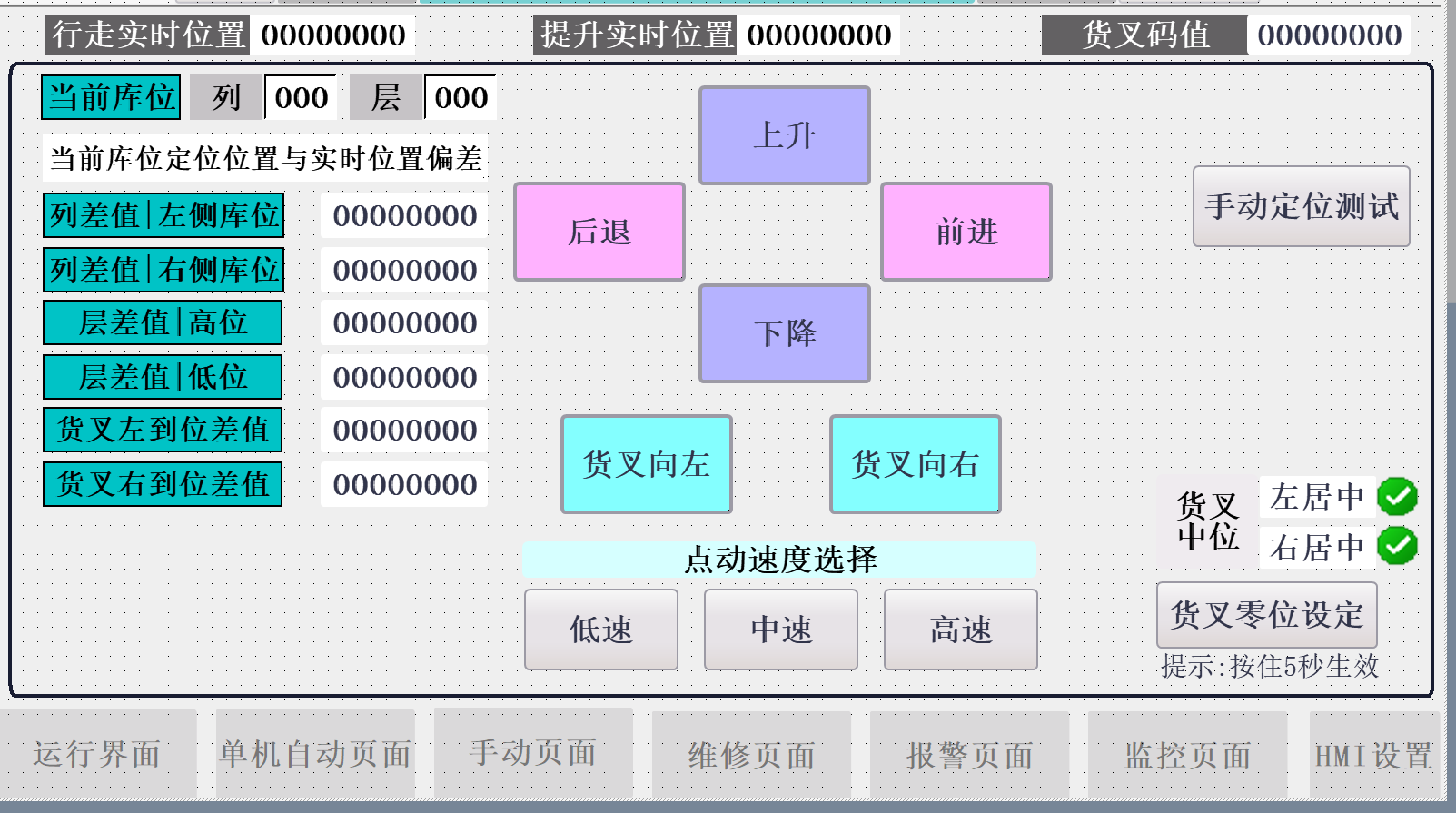
屏幕分为几个区域:状态显示区、控制输入区、导航指示区、报警信息区。状态显示区需要实时反馈堆垛机的位置、速度、载货状态等关键参数。控制输入区要有方向控制按钮,比如前后左右移动,升降控制,可能还需要速度调节的滑块或选择按钮。
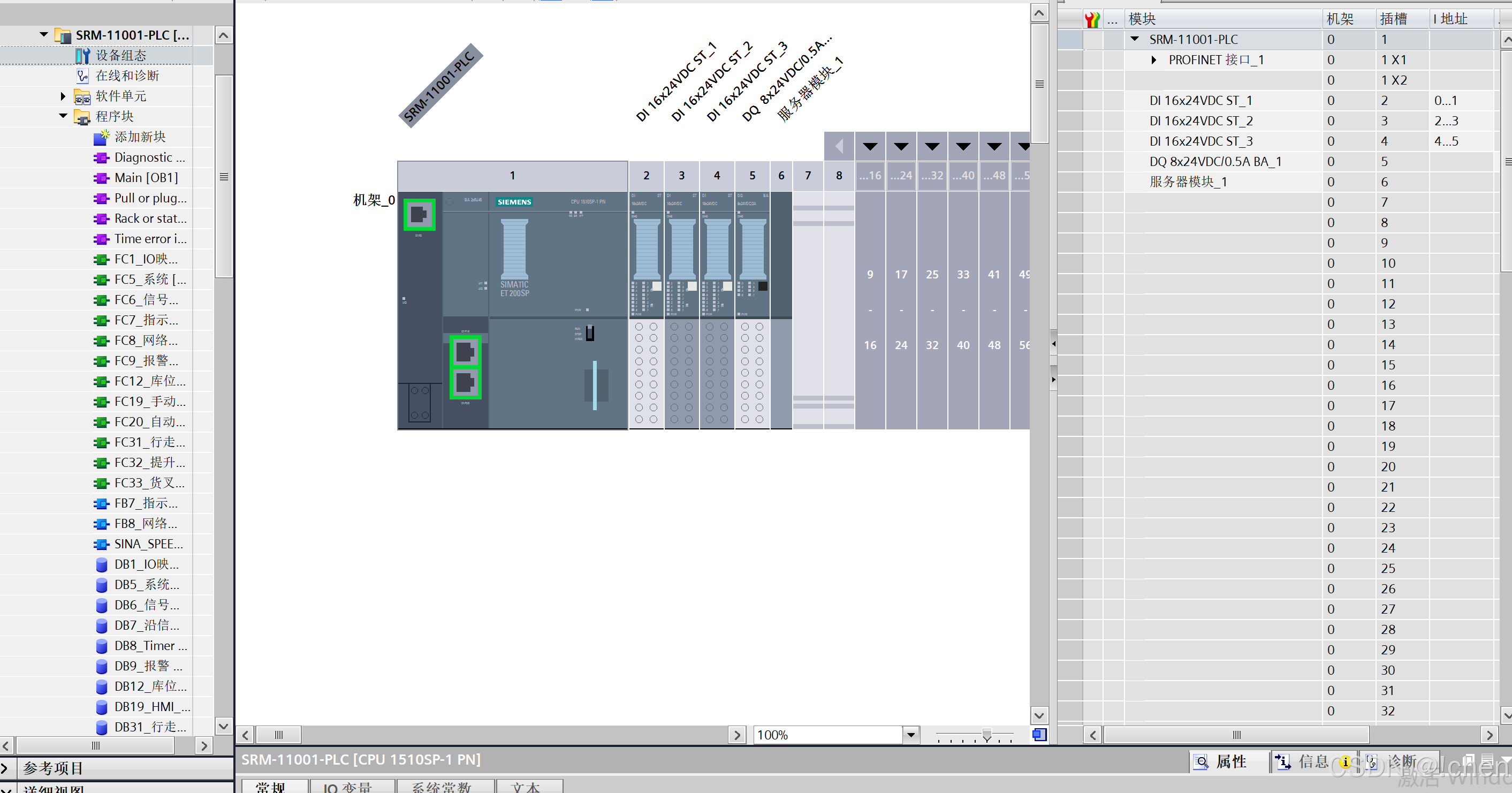
2、控制系统硬件组态如下图
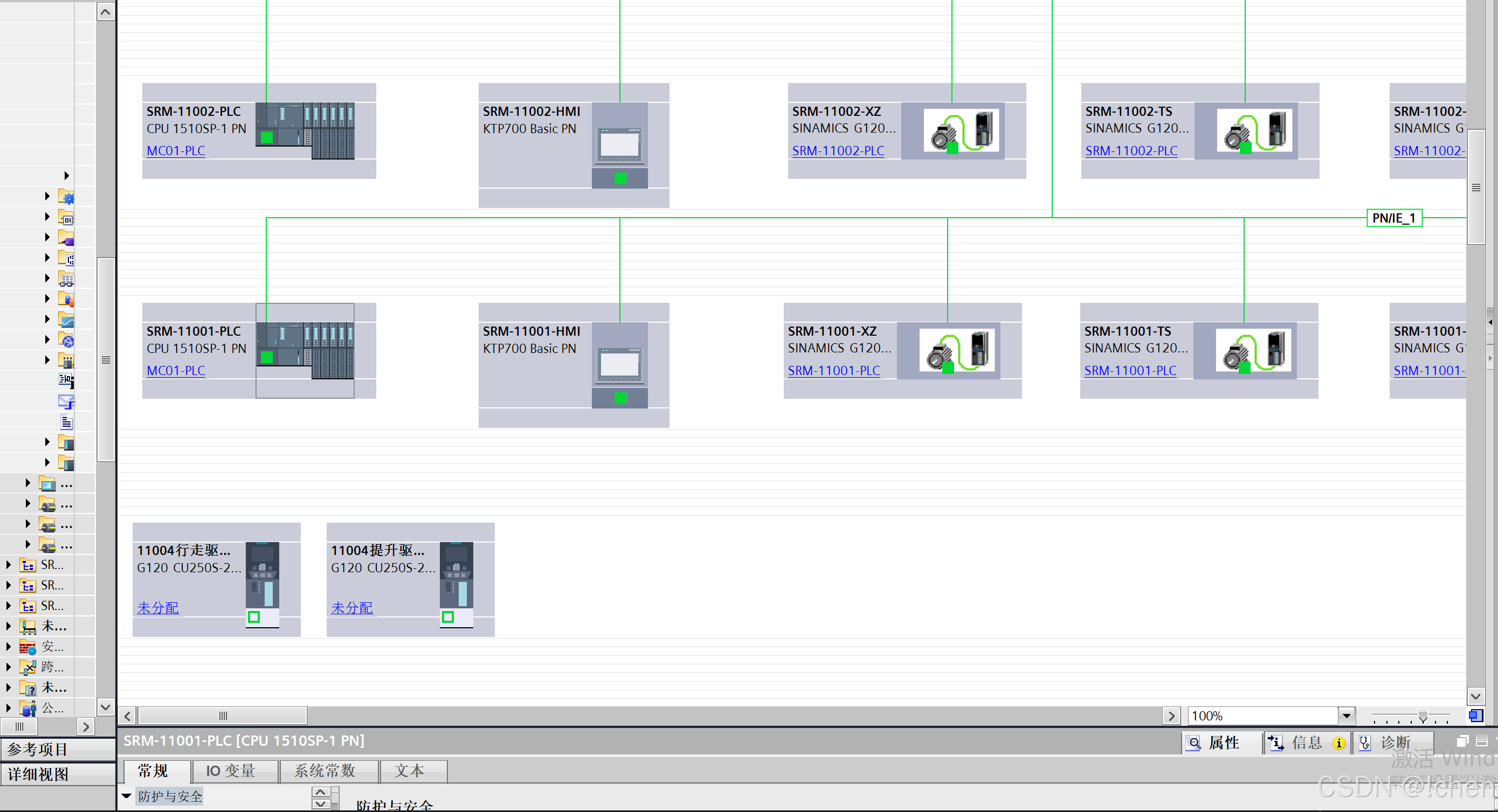
3、堆垛机SRM控制系统中相关变量定义如下图
其中包含系统控制相关变量:系统急停、系统手动、复位、货叉左极限、货叉左居中 货叉右极限 货叉右居中 货叉