Haption在危险、挑战性或受限环境中操作的情况提供了一种创新的遥操作解决方案
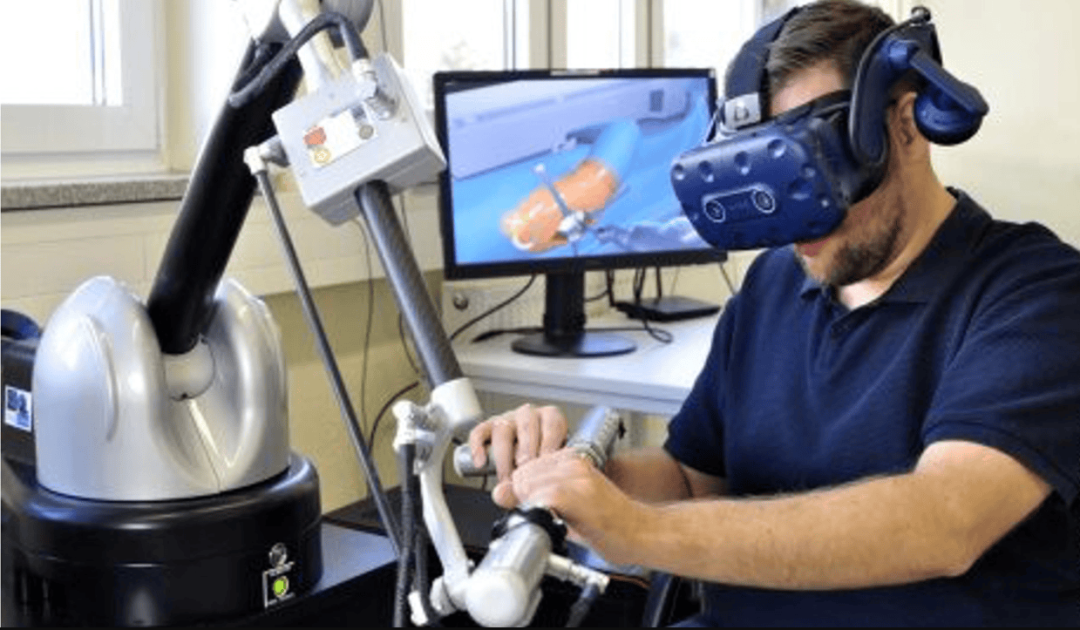
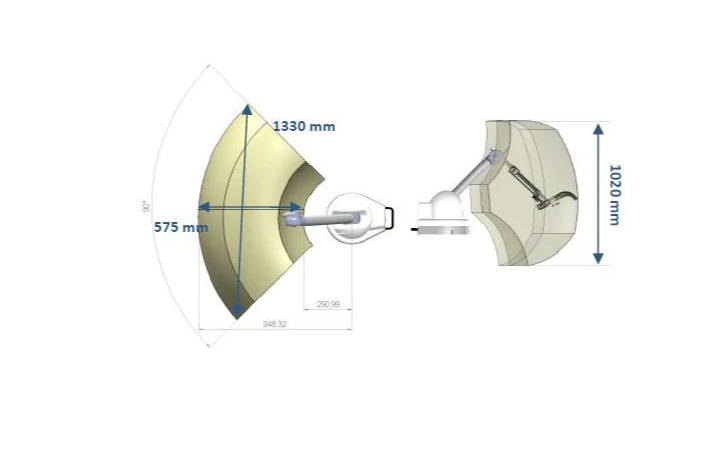
Haption Virtuose 6D TAO是一款拥有7个主动自由度的触觉设备,专为虚拟现实环境交互而设计。
它与Virtuose的一系列软件解决方案兼容,可让您直接在CAD软件中使用该设备进行装配仿真,并在3D游戏引擎中使用该设备,从而打造更加逼真的沉浸式体验。Virtuose 6D TAO High Force提供的力反馈级别是标准版的三倍。该版本专为需要极高力反馈的应用而设计。这种额外的力反馈能力对于控制有效载荷超过6公斤的机器人至关重要。

远程机器人扩展器
TeleRobotics EXtender (TREX) 是一个专为力反馈远程操作而设计的框架。它为操作员必须在危险、挑战性或受限环境中操作的情况提供了一种创新的解决方案,使他们能够在不暴露自身风险的情况下执行任务。借助 TREX,操作员可以手动控制远程机器人,使其拥有高灵活性和高精度,同时还可以通过Virtuose力反馈设备感知施加的力。
1.无需代码即可实现即时、直观的控制
2.OPC-UA接口,工业4.0数据交换标准
3.操作员摄像机视图管理
4.操作员指导功能


捆绑套件
有了 Virtuose + Trex的套装优惠,您很快就能掌控自己的遥控机器人系统!Haption 的遥控机器人解决方案包含一个Haption力反馈设备(例如 Virtuose 6D High Force TAO 或 Virtuose 6D TAO)作为机械手,以及一个Haption通用遥控控制器设备(称为TREX)。
TREX支持的机械臂包括:
1.优傲机器人 2.弗兰卡 3.基诺瓦 4.库卡 5.以及更多!