吉林大学操作系统上机实验五(磁盘引臂调度算法(scan算法)实现)
本次实验无参考,从头开始实现。
一.实验内容
- 模拟实现任意一个磁盘引臂调度算法,对磁盘进行移臂操作
- 列出基于该种算法的磁道访问序列,计算平均寻道长度。
二.实验设计
- 假设磁盘只有一个盘面,并且磁盘是可移动头磁盘。
- 磁盘是可供多个进程共享的存储设备,但一个磁盘每个时刻只能为一个进程服务。当有进程在 访问某个磁盘时,其它想访问该磁盘的进程必须等待,直到磁盘一次工作结束。当有多个进程 提出输入输出请求而处于等待状态时,可选用适当的磁盘调度算法从若干个等待访问者中选择 一个进程,让它访问磁盘。为此设置“驱动调度”进程。
- “初始化”进程建立一张“进程请求 I/O”表,列出等待访问磁盘的进程要求访问的磁道,表的格式如下:
三.实验准备
- 扫描算法(SCAN)
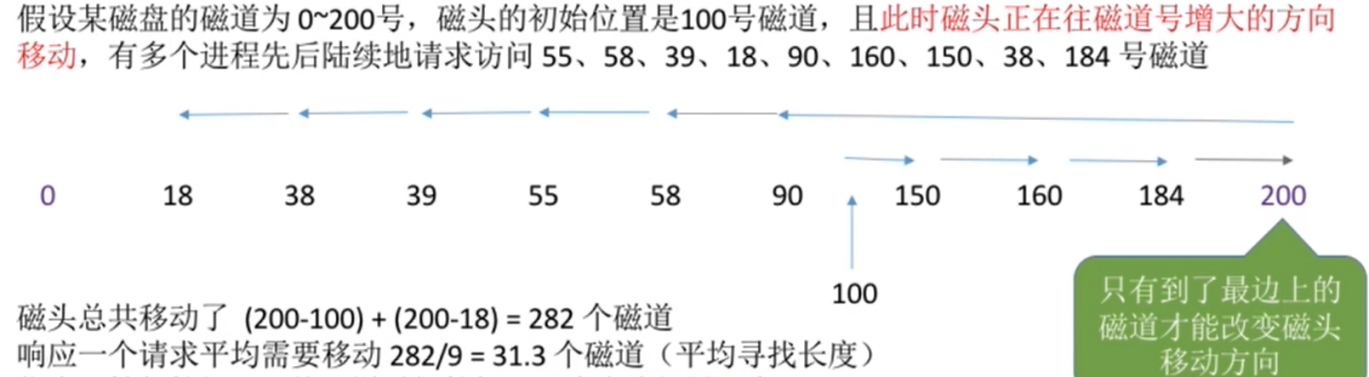
图一 SCAN算法
- SCAN算法是一种用于磁盘调度的算法,旨在优化磁盘臂的移动,以减少磁盘访问的平均等待时间。SCAN算法也被称为ELEVATOR算法,因为它模仿了电梯(升降机)的行为:磁盘臂在磁盘的一端开始移动,沿着一个方向移动直到到达另一端,然后反向移动,服务沿途的所有请求,直到回到起始端。
- 选择方向:磁盘臂可以往一个方向移动,比如从磁盘的外围磁道向内移动,或者从内向外移动。这个方向通常是由磁盘臂上次移动的方向决定,或者是根据请求的分布情况来设定。
- 服务请求:磁盘臂在移动过程中,会服务所有沿移动方向的未服务请求。
- 到达端点:当磁盘臂到达磁盘的一端时,它会反向移动,同时继续服务沿新移动方向的请求。
- 重复过程:磁盘臂会继续在磁盘的两端之间移动,服务所有请求,直到所有请求都被服务完毕。
- 减少寻址时间:由于磁盘臂只在两个方向上移动,可以减少磁盘臂的移动距离,从而减少寻址时间。
- 防止请求饥饿:与SSTF算法相比,SCAN算法可以确保所有请求最终都会被服务,因为磁盘臂会在两个方向上移动。
- 磁头震荡:虽然SCAN算法可以减少磁盘臂的移动距离,但如果请求集中在磁盘的一端,可能会导致磁盘臂在两端之间频繁移动,造成磁头震荡。
- 响应时间不均:请求的响应时间可能会因为它们在磁盘上的位置而有所不同,位于磁盘两端和中间的请求可能会有不同的响应时间。
四.代码
#include <stdio.h>
#include <stdlib.h>// SCAN 算法的核心函数
int SCAN(int* cyc_list, int* cyc_order, int n, int start, int dir) {int sum, max_int, min_value, index, tag[100] = { 0 };sum = 0; int x_max = cyc_list[0], x_min = cyc_list[0];for (int i = 1; i < n; i++) {if (cyc_list[i] > x_max) {x_max = cyc_list[i];}if (cyc_list[i] < x_min) {x_min = cyc_list[i];}}int turn = 0;for (int i = 0; i < n; i++) {max_int = 9999;for (int j = 0; j < n; j++) {if (dir == 1 && cyc_list[j] > start && tag[j] == 0) {// cyc_list表示待执行柱面min_value = cyc_list[j] - start;if (min_value < max_int) {max_int = min_value;index = j; // 记录距离最小的待执行柱面号的索引}}else if (dir == 0 && cyc_list[j] < start && tag[j] == 0) {min_value = abs(cyc_list[j] - start);if (min_value < max_int) {max_int = min_value;index = j; // 记录距离最小的待执行柱面号的索引}}}// 判断是否需要转向if (dir == 1 && turn == 0 && cyc_list[index] == x_max) {dir = 0;if (i != n - 1) sum += 2 * (500 - x_max);`turn = 1;}else if (turn == 0 && cyc_list[index] == x_min) {dir = 1;if (i != n - 1) sum += 2 * x_min;}sum += max_int; // 累积磁头移动轨道数tag[index] = 1;cyc_order[i] = cyc_list[index];start = cyc_list[index];}return sum;
}// SCAN
void main() {int cyc_list[100], cyc_order[100], n, start, dir, ans = 0;printf("请输入磁臂初始移动方向(1向内,0向外):");//1向大数走,0向小数走scanf("%d", &dir);printf("请输入初始柱面和待执行柱面数量:");scanf("%d%d", &start, &n);printf("请输入待执行柱面:");for (int i = 0; i < n; i++) {scanf("%d", &cyc_list[i]);}ans = SCAN(cyc_list, cyc_order, n, start, dir);printf("SCAN走道顺序为:");for (int i = 0; i < n; i++) {printf("%d", cyc_order[i]);if (i + 1 != n) {printf(" -> ");}}printf("\n");printf("磁头走过总道数为:%d\n", ans);float res = (float)ans / n;printf("平均寻道长度: %.1f\n", res);
}具体实现:
main函数中录入必要数据。
SCAN函数执行具体选取。
x_max和x_min分别记录输入数据中最大柱面和最小柱面。
int x_max = cyc_list[0], x_min = cyc_list[0];
for (int i = 1; i < n; i++) {if (cyc_list[i] > x_max) {x_max = cyc_list[i];}if (cyc_list[i] < x_min) {x_min = cyc_list[i];}
}每一次选取时,都选取在磁头移动方向上,距离上次位置(start)最近且未被选取过(tag=0)的点。
max_int = 9999;
for (int j = 0; j < n; j++) {if (dir == 1 && cyc_list[j] > start && tag[j] == 0) {// cyc_list表示待执行柱面min_value = cyc_list[j] - start;if (min_value < max_int) {max_int = min_value;index = j; // 记录距离最小的待执行柱面号的索引}}else if (dir == 0 && cyc_list[j] < start && tag[j] == 0) {min_value = abs(cyc_list[j] - start);if (min_value < max_int) {max_int = min_value;index = j; // 记录距离最小的待执行柱面号的索引}}
}每次选取后,若开始时向内,则判断是否未转向过且选取点是最大点,若是,则转向。如果该点不是最后一个点,则磁头总移动距离需另外加上移到边界又再次移动到该点的距离。开始时向外类似处理。
// 判断是否需要转向
if (dir == 1 && turn == 0 && cyc_list[index] == x_max) {dir = 0;if (i != n - 1) sum += 2 * (500 - x_max);`turn = 1;
}
else if (turn == 0 && cyc_list[index] == x_min) {dir = 1;if (i != n - 1) sum += 2 * x_min;
}选取完成后,累积磁头移动轨道数,将该点访问标志(tag)置1,将该点加入序列,更新上次位置(start)为该点柱面数。
sum += max_int; // 累积磁头移动轨道数
tag[index] = 1;
cyc_order[i] = cyc_list[index];
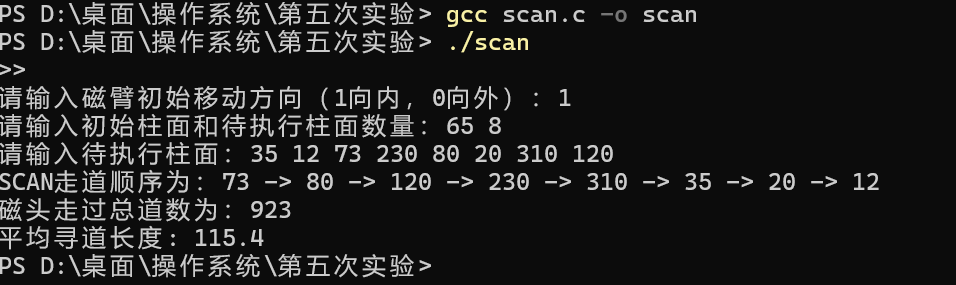
start = cyc_list[index];五.运行结果
TIPS:模拟硬盘一共有500柱面。