unity控制相机围绕物体旋转移动
记录一下控制相机围绕物体旋转与移动的脚本,相机操作思路分为两块,一部分为旋转,一部分为移动,旋转是根据当前center中心点的坐标,根据距离设置与默认的旋转进行位置移动,移动是根据相机的左右和前后进行计算,当获取到移动的值时把中心点进行移动,而不是移动相机,相机是根据中心点的坐标进行计算自己的坐标
这个中心点是一个空物体放在模型下方,不要把模型放进去,
默认的角度设置需要提前说一下,例如当前我相机在场景的旋转为(39,135,0),
如果我想在运行的时候也是这个角度 就需要吧相机x轴填入到脚本的y轴上,需要取反为负数
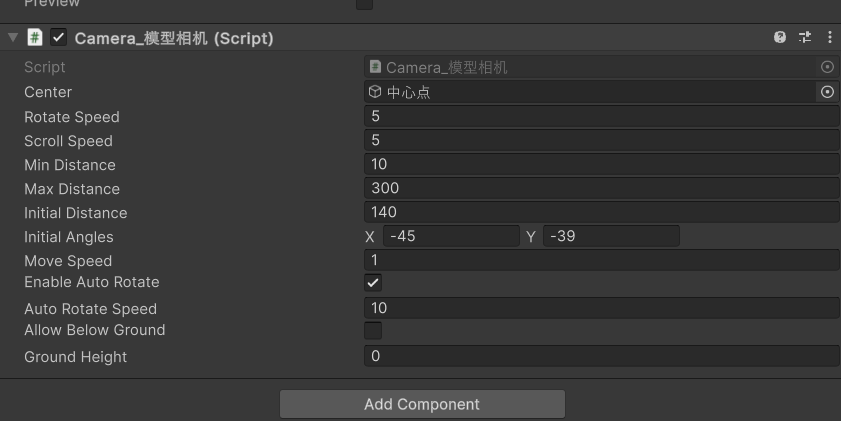
相机的y轴放到脚本的x上,但是脚本的y需要自身的旋转减去180 设置就为(-45,-39,0)
这样做的理由就是把360的角度映射为正负1800
剩下的就是是否开启自旋转与是否可以低于地面


using QFramework;
using System.Collections;
using System.Collections.Generic;
using TMPro;
using UnityEngine;public class Camera_模型相机 : MonoBehaviour
{// public Transform target; // 目标物体public GameObject center;//围绕点public float rotateSpeed = 5.0f; // 旋转速度public float scrollSpeed = 5.0f; // 滚轮速度public float minDistance = 20f; // 最小距离public float maxDistance = 150; // 最大距离public float initialDistance = 20.0f; // 初始距离public Vector2 initialAngles = new Vector2(0f, 30f); // 初始角度(水平,垂直)public float moveSpeed;//移动速度float move_X,move_Y;private float currentDistance;private float horizontalAngle;private float verticalAngle;public bool enableAutoRotate = false; // 是否启用自动旋转public float autoRotateSpeed = 10f; // 自动旋转速度bool bl_旋转控制;Vector3 initialPos;float time_自选择控制=5;public bool allowBelowGround = true; //是否允许低于地面public float groundHeight = 0f; // 地面高度(可自定义)void Start(){currentDistance = initialDistance;horizontalAngle = initialAngles.x;verticalAngle = initialAngles.y;initialPos = center.transform.position;UpdateCameraPosition();}void Update(){HandleMouseInput();HandleScrollInput();if (enableAutoRotate){if (!bl_旋转控制){time_自选择控制 += Time.deltaTime;if (time_自选择控制 >= 5) { bl_旋转控制 = true; time_自选择控制 = 0; }}AutoRotateCenter();}UpdateCameraPosition();}void AutoRotateCenter(){if (bl_旋转控制) horizontalAngle -= autoRotateSpeed * Time.deltaTime;}void HandleMouseInput(){if (Input.GetMouseButton(1)){bl_旋转控制 = false;time_自选择控制 = 0;// 获取鼠标移动量horizontalAngle += Input.GetAxis("Mouse X") * rotateSpeed;verticalAngle += Input.GetAxis("Mouse Y") * rotateSpeed;verticalAngle = Mathf.Clamp(verticalAngle, -89f, 89f); // 限制垂直角度} // 新增右键平移逻辑// 鼠标左键移动if (Input.GetMouseButton(0)){bl_旋转控制 = false;time_自选择控制 = 0;move_X = moveSpeed * Input.GetAxis("Mouse X");move_Y= moveSpeed* Input.GetAxis("Mouse Y");Vector3 right = transform.right * move_X;Vector3 forward = transform.forward * move_Y;forward.y = 0; // 保持水平移动// print((right + forward));center.transform.Translate(-(right + forward), Space.World);}}void HandleScrollInput(){float scroll = Input.GetAxis("Mouse ScrollWheel");currentDistance -= scroll * scrollSpeed;currentDistance = Mathf.Clamp(currentDistance, minDistance, maxDistance);}public void ResetCamera(){// 重置到初始状态currentDistance = initialDistance;horizontalAngle = initialAngles.x;verticalAngle = initialAngles.y;center.Position(initialPos); bl_旋转控制 = false;}void UpdateCameraPosition(){// 计算旋转Quaternion yaw = Quaternion.AngleAxis(horizontalAngle, Vector3.up);Quaternion pitch = Quaternion.AngleAxis(verticalAngle, Vector3.right);Quaternion combinedRotation = yaw * pitch;// 计算相机位置Vector3 offset = combinedRotation * Vector3.forward * currentDistance;Vector3 targetPos = center.transform.position + offset;// 新增地面高度限制if (!allowBelowGround && targetPos.y < groundHeight){targetPos.y = groundHeight+0.2f; 重新计算距离保持原有水平距离//float horizontalDist = Mathf.Sqrt(// Mathf.Pow(targetPos.x - center.transform.position.x, 2) +// Mathf.Pow(targetPos.z - center.transform.position.z, 2)//);//currentDistance = horizontalDist / Mathf.Cos(Mathf.Asin(// (groundHeight - center.transform.position.y) / currentDistance//));}transform.position = targetPos;// 确保相机看向目标transform.LookAt(center.transform.position);}
}