LabVIEW中EtherCAT从站拓扑离线创建及信息查询
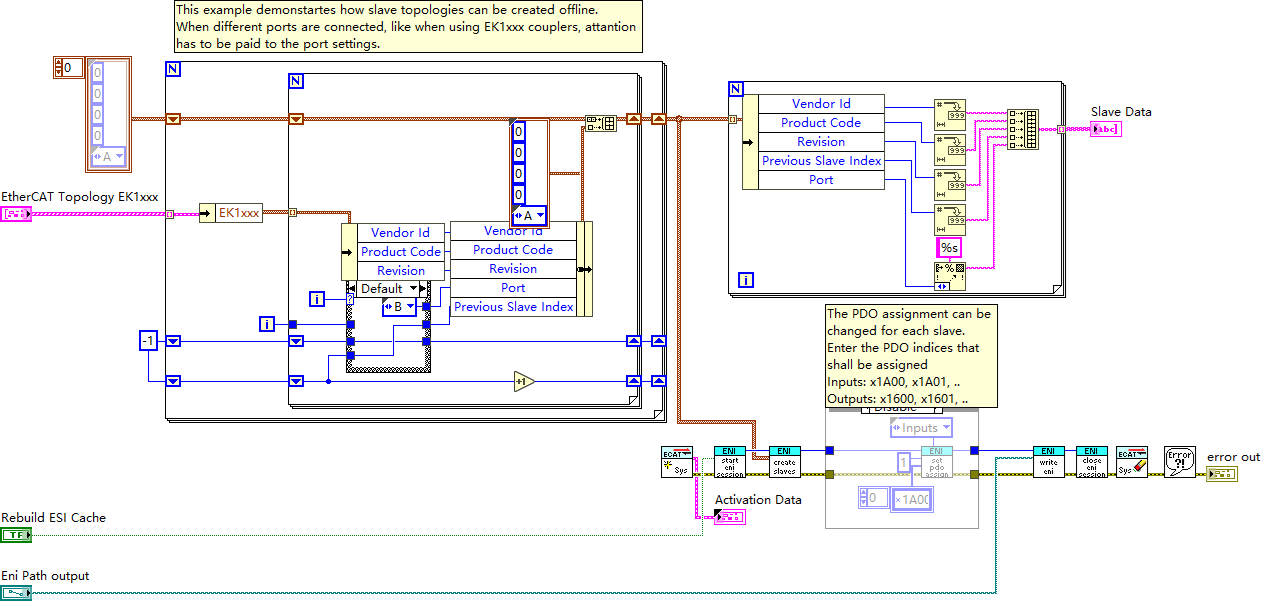
该 VI 主要用于演示如何离线创建 EtherCAT 从站拓扑结构,并查询从站相关信息。EtherCAT(以太网控制自动化技术)是基于以太网的实时工业通信协议,凭借其高速、高效的特性在自动化领域广泛应用。与其他常见工业通讯协议相比,EtherCAT 在通信性能、拓扑结构、系统配置等方面具有显著优势。
各部分功能及介绍
-
EtherCAT 拓扑部分(EtherCAT Topology EK1xxx)
-
功能:构建 EtherCAT 从站拓扑结构。通过设置 EK1xxx 耦合器相关参数来定义从站连接关系。
-
用途:在工业自动化系统搭建前期,进行从站网络拓扑的规划和配置,确保各从站设备能正确接入网络并通信。
-
注意事项:不同端口连接时(如使用 EK1xxx 耦合器),需仔细设置端口参数,保证拓扑连接正确。
-
应用场景:工业自动化生产线、智能工厂等需要多设备联网协同工作的场景。
-
优缺点:相比现场在线配置拓扑,离线配置更便于前期规划和调试,可减少现场调试时间和出错概率;缺点是灵活性稍逊,若现场设备有变动,可能需重新配置。
-
与其他协议对比:EtherCAT 支持多种拓扑结构(总线型、星型、树型等),并可混合使用,布线成本低。而 Profibus 主要为总线型拓扑,DeviceNet 为干线 - 分支结构,拓扑灵活性较差。
-
-
从站数据部分(Slave Data)
-
功能:获取和处理从站设备的详细信息,包括 Vendor Id(供应商 ID)、Product Code(产品代码)、Revision(版本)、Previous Slave Index(前一个从站索引)、Port(端口)等。
-
用途:用于识别和管理从站设备,方便工程师了解设备基本信息,在设备维护、故障排查时可快速定位设备。
-
注意事项:需准确获取和解析从站设备的各项信息,不同厂商设备信息格式可能有差异。
-
应用场景:设备管理、系统维护、故障诊断等环节。
-
优缺点:优点是能全面获取从站设备信息,便于精细化管理;缺点是信息解析和处理相对复杂,若设备信息更新不及时,可能导致管理混乱。
-
与其他协议对比:EtherCAT 采用分布式时钟技术,时钟同步精度可达 1μs 以内,从站自动同步时间戳,无需主站干预,时间同步更精准。而 Profinet IO 同步精度约 100μs,Modbus TCP 无专门同步机制。
-
-
重建 ESI 缓存部分(Rebuild ESI Cache)
-
功能:当有新的 ESI(EtherCAT Slave Information)文件放入指定文件夹时,重建 ESI 缓存。
-
用途:确保系统能及时识别新加入或更新的从站设备信息,维持系统对从站设备信息的最新认知。
-
注意事项:需保证 ESI 文件路径正确,且文件格式符合要求。
-
应用场景:设备更新、扩容等场景下,确保系统能正常识别新设备。
-
优缺点:优点是能快速响应设备信息更新;缺点是若频繁重建缓存可能影响系统性能,且对文件管理要求较高。
-
与其他协议对比:EtherCAT 的 ESI 文件包含从站设备完整描述,主站通过读取 ESI 文件自动配置从站,无需复杂手动配置。而 Modbus 依赖用户手动配置寄存器地址,Profinet 需要 GSD 文件但配置相对复杂。
-
-
激活数据部分(Activation Data)
-
功能:设置与激活相关的数据,如 RT Master(实时主站)、Win Master(Windows 主站)等选项,可选择是否进行 RT Processing(实时处理)、ENI Creator(ENI 文件创建)等操作。
-
用途:根据不同的系统需求和运行模式,配置合适的激活参数,确保系统按预期方式运行。
-
注意事项:需根据实际应用场景准确选择激活参数,不同参数组合可能影响系统运行效果。
-
应用场景:系统启动、运行模式切换等场景。
-
优缺点:优点是可灵活配置系统运行参数;缺点是参数配置不当可能导致系统运行异常。
-
与其他协议对比:EtherCAT 支持多种主站运行模式,可根据实际需求选择,实时性能强,1000 个 I/O 更新时间只需 30μs。而 Modbus TCP 实时性较差,CANopen 通信周期通常在毫秒级。
-
EtherCAT 通讯特点总结
-
高速与低延迟:EtherCAT 数据帧采用 “按位传输”,节点在数据帧经过时直接读写相关数据,无需完整存储和再转发。1000 个 I/O 更新时间只需 30μs,传输大量数据耗时短,如单个以太网帧最多进行 1486 字节过程数据交换(约 12000 个数字输入输出)仅耗时 300μs。相比之下,Profibus 传输延迟通常在毫秒级,CANopen 传输速率最高 1Mbps,实时性较差。
-
拓扑灵活:支持多种拓扑结构(总线型、星型、树型等),并可混合使用,布线成本低。而 Profibus 主要为总线型拓扑,DeviceNet 为干线 - 分支结构,拓扑灵活性较差。
-
精准时钟同步:采用分布式时钟技术,时钟同步精度可达 1μs 以内,从站自动同步时间戳,无需主站干预。而 Profinet IO 同步精度约 100μs,Modbus TCP 无专门同步机制。
-
配置简单:ESI 文件包含从站设备完整描述,主站通过读取 ESI 文件自动配置从站,无需复杂手动配置。而 Modbus 依赖用户手动配置寄存器地址,Profinet 需要 GSD 文件但配置相对复杂。
总结
该 VI 围绕 EtherCAT 从站拓扑构建和信息查询展开,通过多部分协同工作,为工业自动化系统中从站设备的管理和配置提供了便利。工程师在使用时,需关注各部分参数设置和注意事项,以充分发挥其功能优势,保障系统稳定、高效运行。与其他工业通讯协议相比,EtherCAT 在通信性能、拓扑结构、同步精度和配置便捷性方面具有明显优势,更适合对实时性要求高、设备数量多、拓扑复杂的工业自动化场景。