红黑树简单模拟实现
- 定义
- 成员变量
- 旋转
- insert
- 以234树的角度来待插入操作
- 具体代码
- 完整代码
我们前面实现了 二叉搜索树和 AVL树。
其中AVL树是二叉搜索树的改进,但是有些人觉得二叉树搜索的插入调整太频繁了,或者说平衡条件过于苛刻。
于是人们放松了左右子树高度差的限制,只需要确保没有一条路径会比其他路劲长出两倍,这就是所谓的红黑树。
定义
红黑树,是一种二叉搜索树,但在每个结点上增加一个存储位表示结点的颜色,可以是Red或Black。 通过对任何一条从根到叶子的路径上各个结点着色方式的限制,红黑树确保没有一条路径会比其他路径长出俩倍,因而是接近平衡的。
红黑树满足的性质:
- 每个结点不是红色就是黑色
- 根节点是黑色的
- 如果一个节点是红色的,则它的两个孩子结点是黑色的
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点)
满足这上面五个条件就确保了最长路径不会超过最短路径两倍。接下来我解释一下这是为什么。
首先看到34两点。满足了这两点之后,我们的理论最短路径就是全黑结点。
那最长路径呢?
因为要满足第四条,所以只能在全黑结点路径上插入红色结点来增长路径,又因为红色结点不能连续,因此最多插入等量的红色结点。这就确保了最长路径不会超过最短路径的两倍。
那为什么根节点要是黑色结点呢?
假如根节点是红色结点,那么他只能插入黑色结点,这就导致了左右子树的黑色结点数量不同。因此根节点只能是黑色的。
成员变量
enum Color
{RED,BLACK
};template<class K,class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Color _col;RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED){}
};
template<class K, class V>
class RBTree
{typedef RBTreeNode<K,V> Node;
public:private:Node* _root = nullptr;
};
旋转
在前文AVL树中我们实现了左单旋和右单旋,那么这两种旋转能不能合并成一个函数呢?
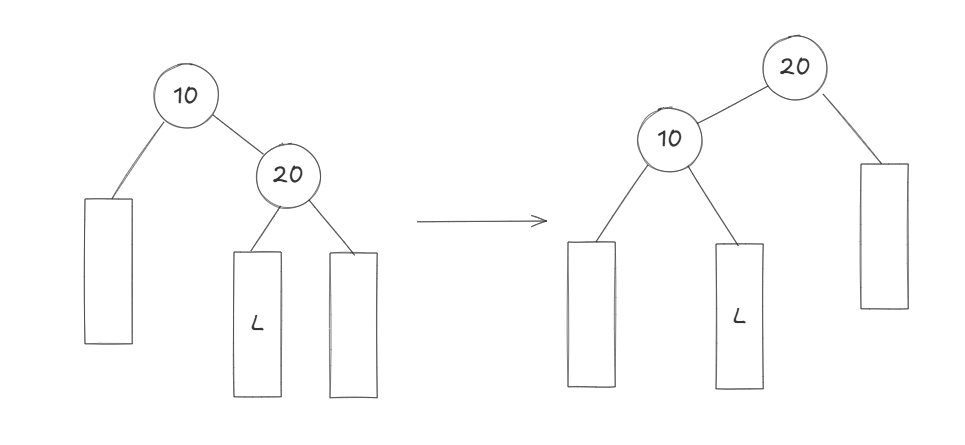
注意到左单旋:
右单旋:
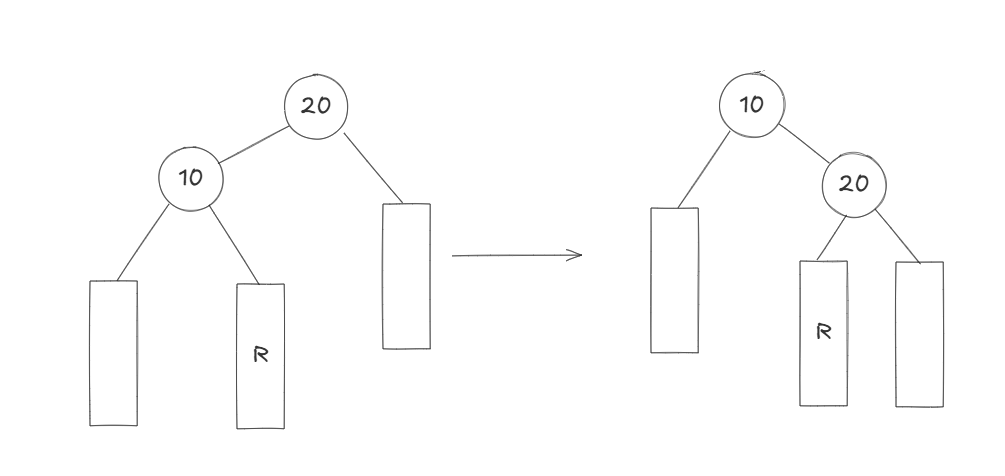
左单旋是将parent右子subR的左子树subRL接到parent的右边。
右单旋是将parent左子subL的右子树subLR接到parent的左边。
如此对称的行为理应可以合并:
void Rotate(Node* child)
{Node* parent = child->_parent;Node** childson[] = { &(child->_right),&(child->_left) };Node** parentson[] = { &(parent->_left),&(parent->_right) };bool IsRight = (child == parent->_right);*(parentson[IsRight]) = *(childson[IsRight]);if (*(childson[IsRight]))(*(childson[IsRight]))->_parent = parent;*(childson[IsRight]) = parent;child->_parent = parent->_parent;parent->_parent = child;if (parent == _root){_root = child;child->_parent = nullptr;}else {//Node* grandparent = parent->_parent; 千错万错Node* grandparent = child->_parent;if (parent == grandparent->_left) grandparent->_left = child;else grandparent->_right = child;}}
这时候如果要左单旋,就传入旋转点的右孩子,如果要右单旋就传入旋转点的左孩子。
insert
对于插入一个结点,那么是默认他为红色还是黑色呢?
如果默认是黑色就会违反所有路径黑色结点数相同这一个规定,如果默认是红色就有可能违反红色结点不连续这一规定。
显然插入红色结点的冲突比较好处理,因此我们默认插入的结点为红色结点。那么就分三种情况:
- 插入的结点是根节点,那只需要让根节点变黑即可
- 插入的结点的父结点是黑色结点,那么不违反规则,不做处理
- 插入的结点的父结点是红色结点,需要处理。
对于第三种情况,又要分两种情况进行讨论:
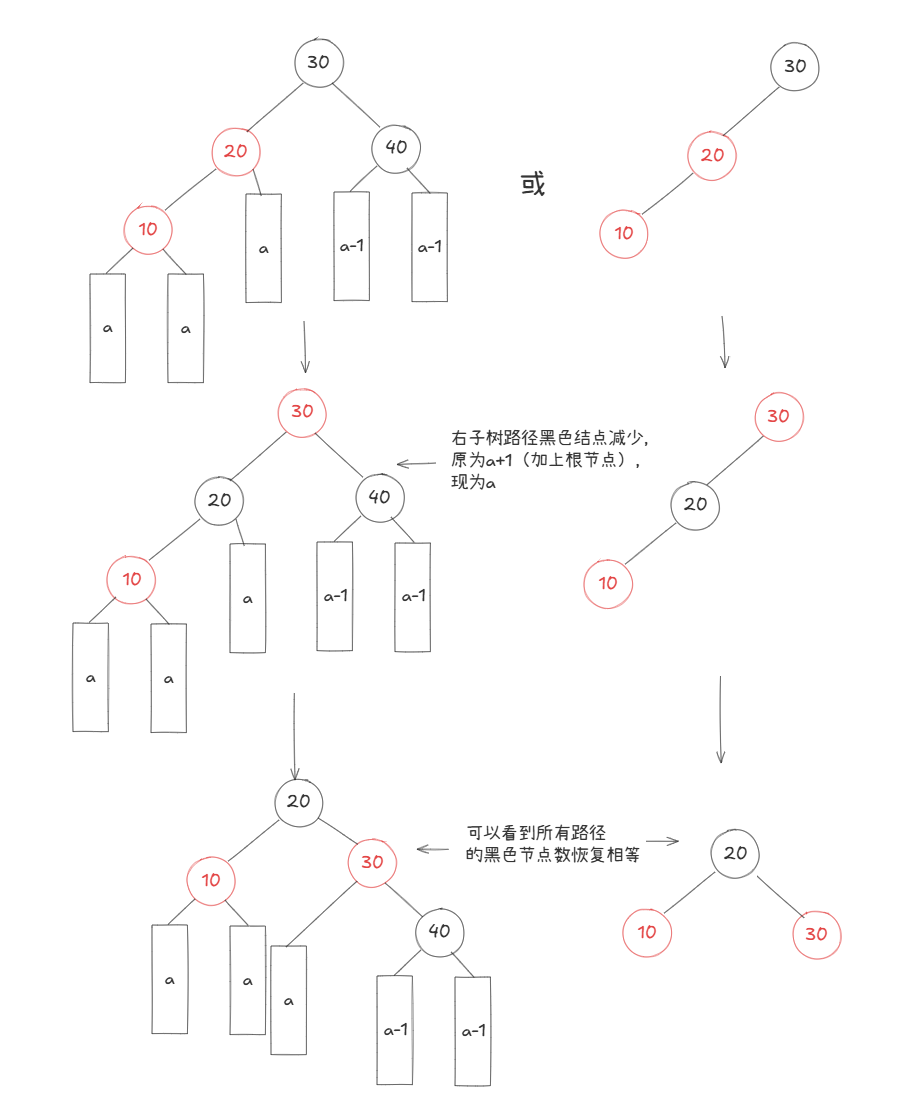
- 叔叔结点存在且为红色:
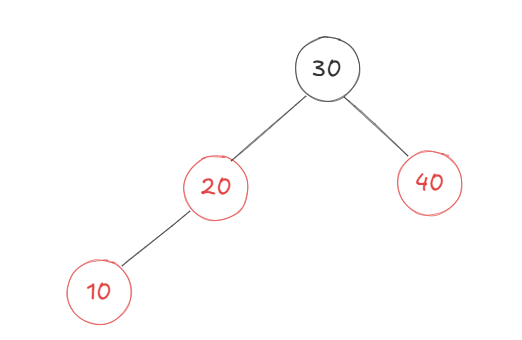
如上,10结点为插入结点。
首先是很容易想到的,为了维持到10结点这一路径的黑色结点个数不变,我们需要将20结点变黑同时将30结点变红,如果仅仅是将20结点变黑,那么到10结点这一路径的黑色结点数就会+1,违反规定4.
那么在30结点变红之后,到40结点这一路径的黑色节点数是不是就少了一个?所以我们要将40结点变黑。如下处理:
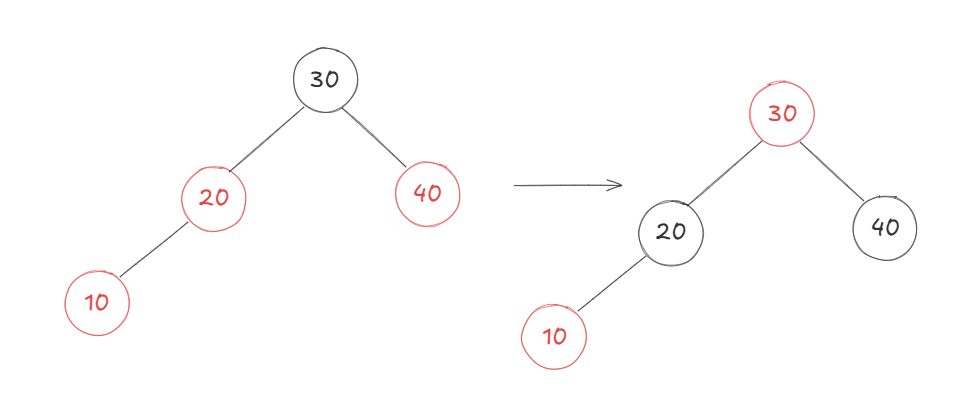
那么30结点有没有可能和他的父结点冲突呢?答案是有可能的,所以我们还需要将30结点看作插入结点继续循环处理。
- 那么再看到另一种情况,也就是叔叔结点不存在或者为黑色
实际上这种情况又详细分为四种,我们先看第一种插入结点为左子结点,叔叔结点为右子结点或者不存在:
由图可知,先将父亲变黑,爷爷变红然后进行右单旋调整
第二种插入结点为右子结点,叔叔结点为左子结点或者不存在,根据对称性可知,先将父亲变黑,爷爷变红然后进行左单旋调整
第三种插入结点为右子结点,叔叔结点为右子结点或者不存在
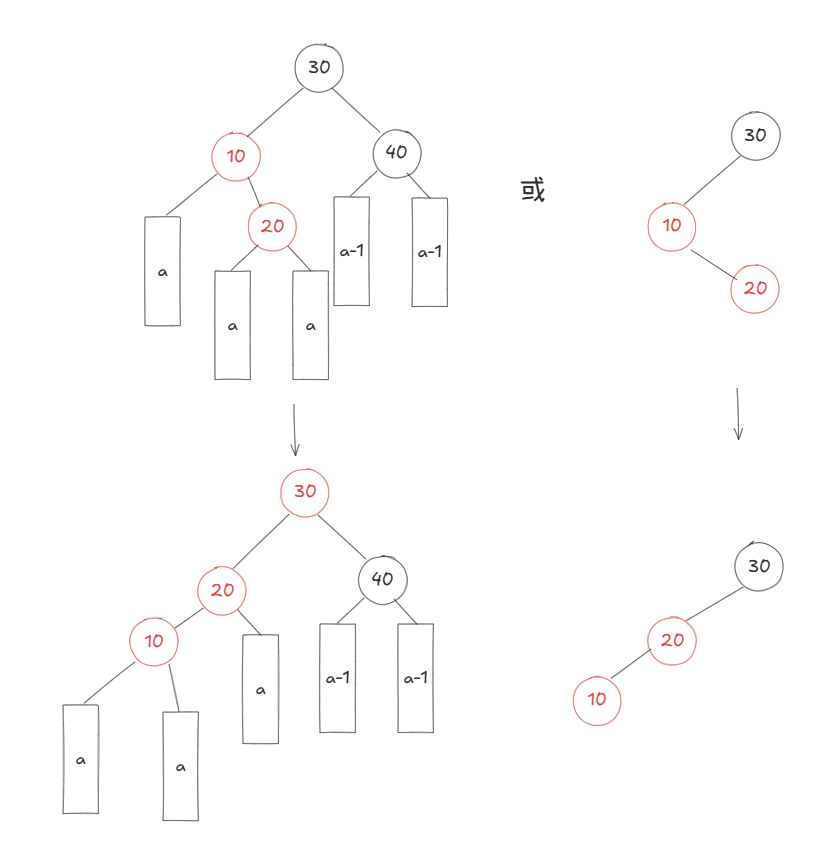
可以看到对父亲结点进行左单旋就转换成了第一种情况,这时按第一种情况除了
第四种插入结点为左子结点,叔叔结点为左子结点或者不存在
以234树的角度来待插入操作
我们可以将红黑树看作一棵二三四树,其中黑色结点为2结点,黑色结点加红色结点为3结点,黑色结点和两个红色结点为4结点。
例如:
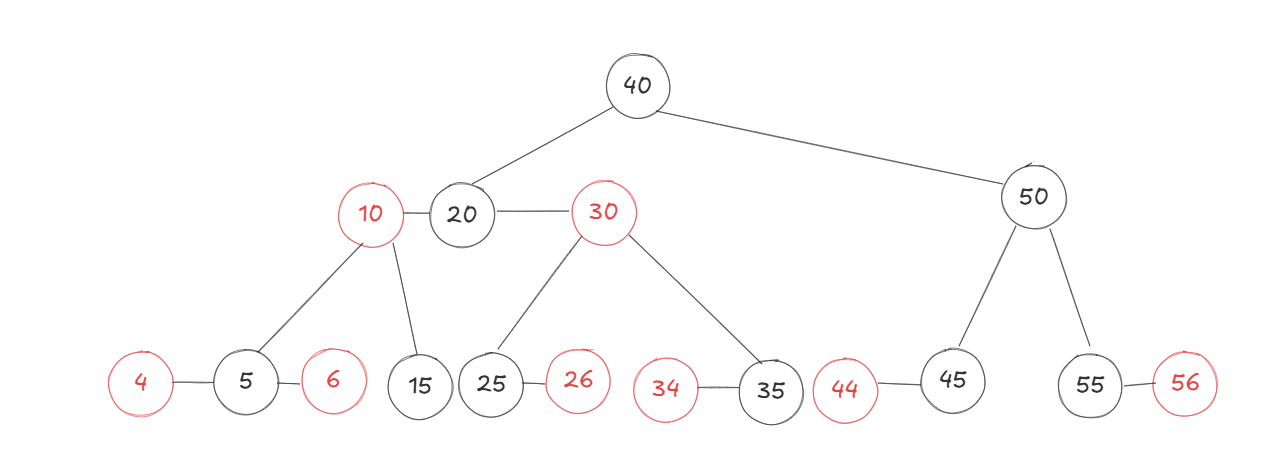
这时我们插入一个16:
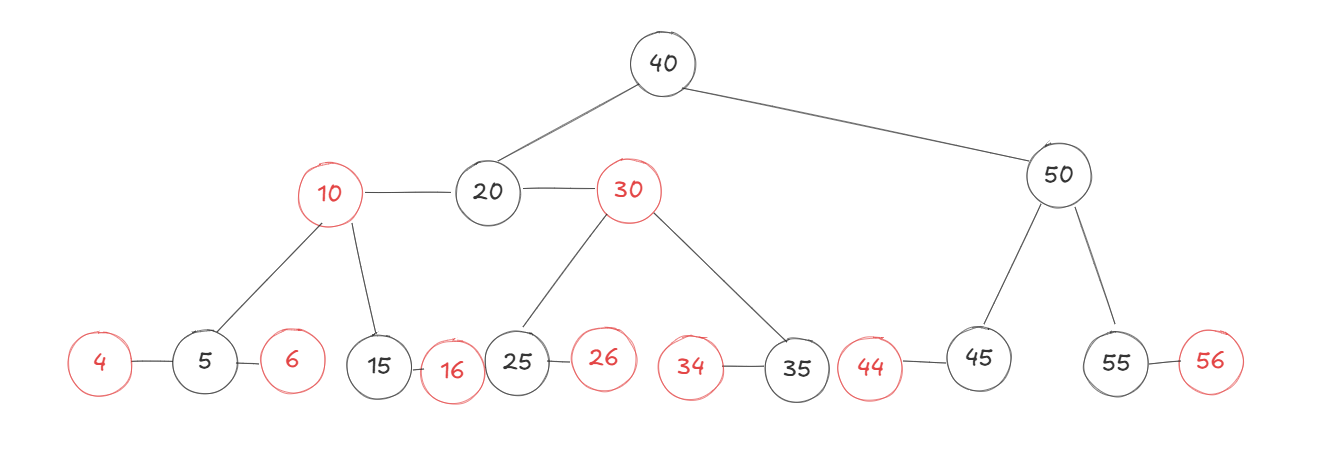
这就对应了父结点时黑色结点,不用处理
如果插入一个3:
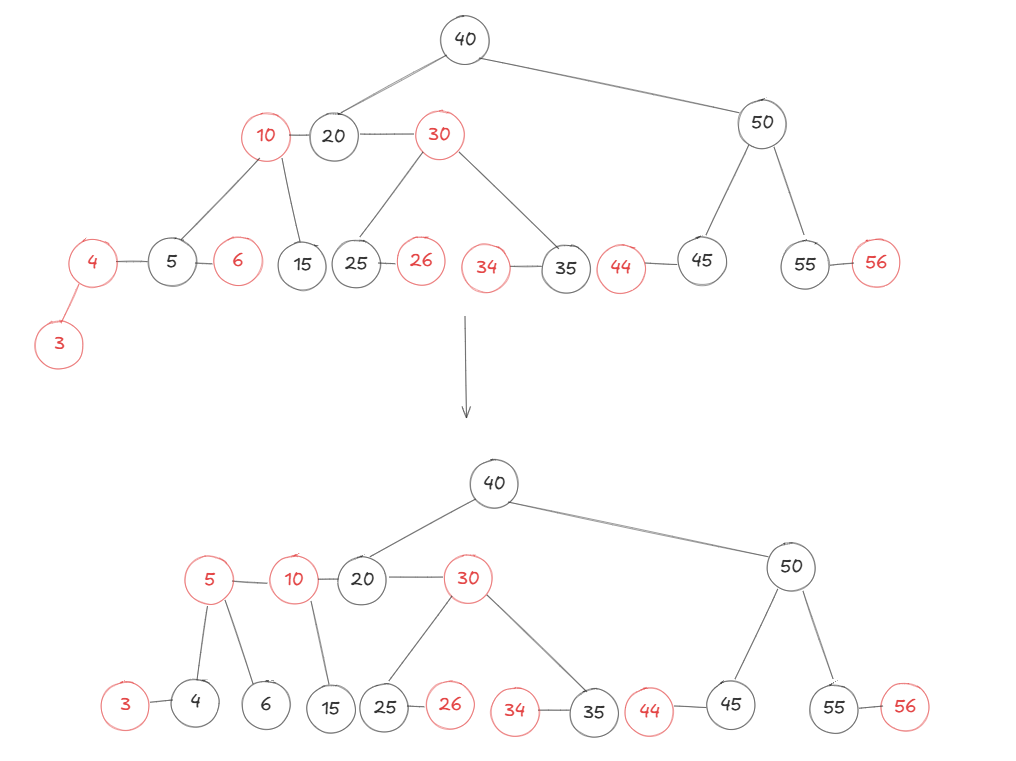
这时候对应叔叔结点存在且为红。
那么5结点上溢,叔父变黑,爷爷变红,继续向上处理。
如果插入一个17:
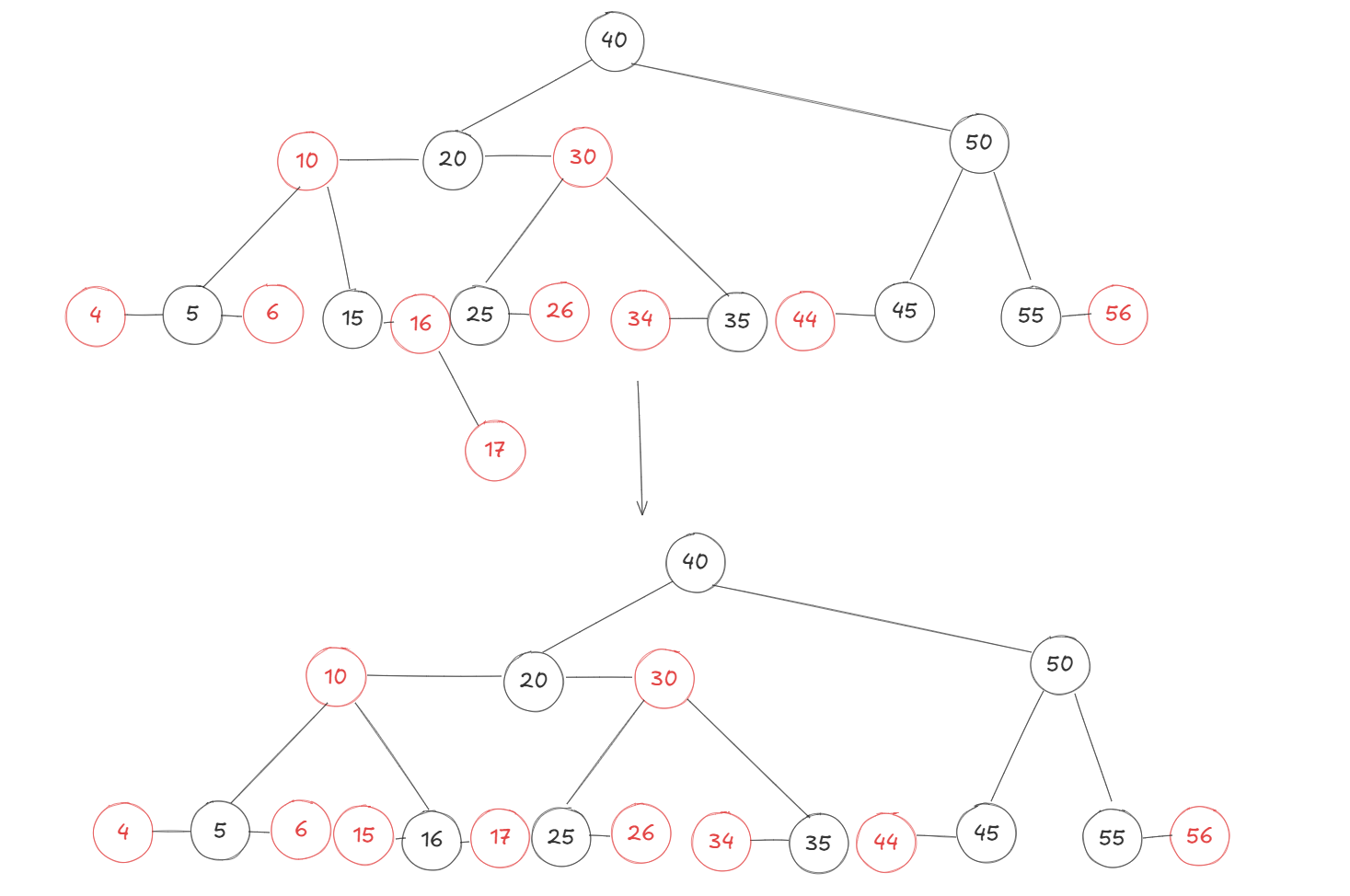
本质上就是父亲做了爷爷,又因为父亲是右子结点,实际上就是进行左单旋。对应插入结点为右子结点,叔叔结点为左子结点或者不存在。
我们再看到如果插入25.5:
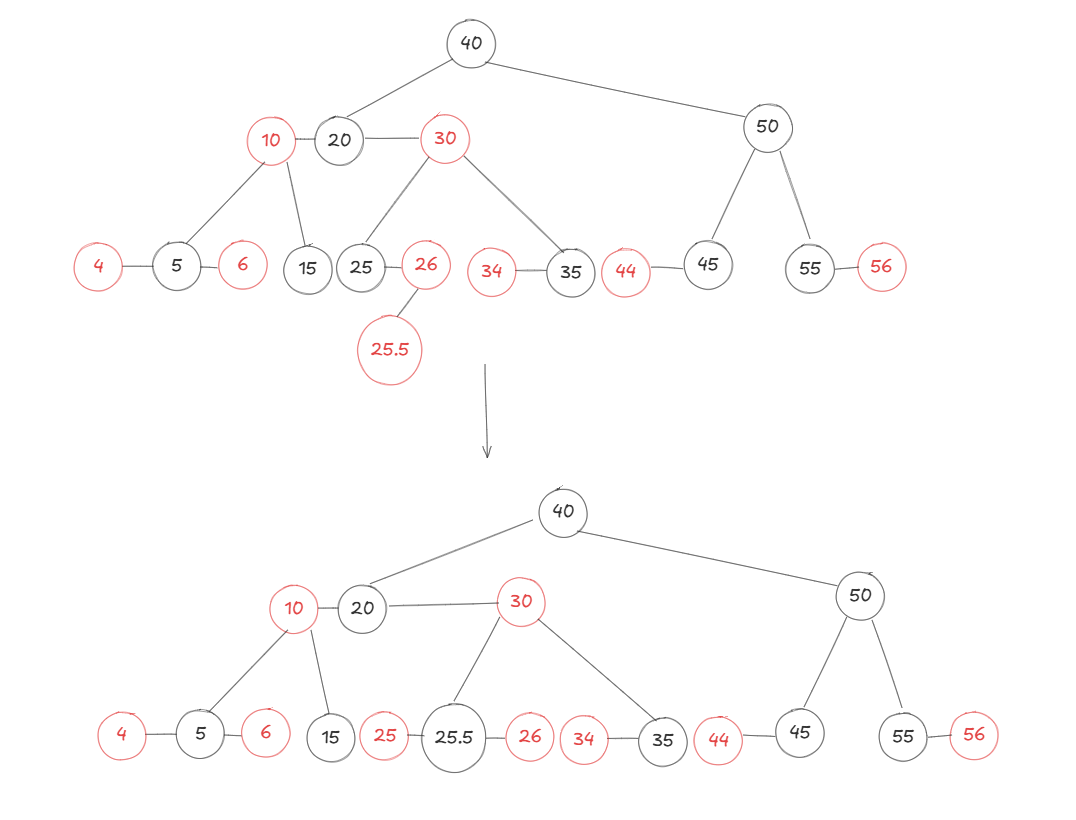
实际上是儿子做了爷爷,首先儿子要当爹,又因为儿子是左子结点,因此右单旋。然后儿子就是爷爷的右子结点了,再左单旋就成了爷爷。最后变色处理。
对应插入结点为左子结点,叔叔结点为左子结点或者不存在。
其余情况也是类似讨论,这里不多做赘述。
具体代码
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);cur->_col = RED; // 新增节点给红色if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//父亲颜色是黑色结束while (parent&&parent->_col == RED){//是否一定有爷爷?肯定的,因为父亲结点是红色,因此不是根节点。Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续处理cur = grandfather;//未必有parentparent = cur->_parent;}else//叔叔不存在或者为黑{if (cur == parent->_left){//RotateR(grandfather);Rotate(grandfather->_left);parent->_col = BLACK;grandfather->_col = RED;}else{//RotateL(parent);//RotateR(grandfather);Rotate(parent->_right);Rotate(grandfather->_left);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续处理cur = grandfather;//未必有parentparent = cur->_parent;}else//叔叔不存在或为黑{if (cur == parent->_right){//RotateL(grandfather);Rotate(grandfather->_right);parent->_col = BLACK;grandfather->_col = RED;}else{RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}//处理边界情况_root->_col = BLACK;return true;
}
完整代码
完整代码包括InOrder和IsBalance
enum Color
{RED,BLACK
};template<class K,class V>
struct RBTreeNode
{RBTreeNode<K, V>* _left;RBTreeNode<K, V>* _right;RBTreeNode<K, V>* _parent;pair<K, V> _kv;Color _col;RBTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _col(RED){}
};template<class K, class V>
class RBTree
{typedef RBTreeNode<K,V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);_root->_col = BLACK;return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);cur->_col = RED; // 新增节点给红色if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//父亲颜色是黑色结束while (parent&&parent->_col == RED){//是否一定有爷爷?肯定的,因为父亲结点是红色,因此不是根节点。Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续处理cur = grandfather;//未必有parentparent = cur->_parent;}else//叔叔不存在或者为黑{if (cur == parent->_left){//RotateR(grandfather);Rotate(grandfather->_left);parent->_col = BLACK;grandfather->_col = RED;}else{//RotateL(parent);//RotateR(grandfather);Rotate(parent->_right);Rotate(grandfather->_left);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续处理cur = grandfather;//未必有parentparent = cur->_parent;}else//叔叔不存在或为黑{if (cur == parent->_right){//RotateL(grandfather);Rotate(grandfather->_right);parent->_col = BLACK;grandfather->_col = RED;}else{RotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}//处理边界情况_root->_col = BLACK;return true;}void Rotate(Node* child){Node* parent = child->_parent;Node** childson[] = { &(child->_right),&(child->_left) };Node** parentson[] = { &(parent->_left),&(parent->_right) };bool IsRight = (child == parent->_right);*(parentson[IsRight]) = *(childson[IsRight]);if (*(childson[IsRight]))(*(childson[IsRight]))->_parent = parent;*(childson[IsRight]) = parent;child->_parent = parent->_parent;parent->_parent = child;if (parent == _root){_root = child;child->_parent = nullptr;}else {//Node* grandparent = parent->_parent; 千错万错Node* grandparent = child->_parent;if (parent == grandparent->_left) grandparent->_left = child;else grandparent->_right = child;}}//void RotateR(Node* parent)//{// Node* subL = parent->_left;// Node* subLR = subL->_right;// parent->_left = subLR;// if (subLR)// subLR->_parent = parent;// subL->_right = parent;// Node* ppNode = parent->_parent;// parent->_parent = subL;// if (parent == _root)// {// _root = subL;// _root->_parent = nullptr;// }// else// {// if (ppNode->_left == parent)// {// ppNode->_left = subL;// }// else// {// ppNode->_right = subL;// }// subL->_parent = ppNode;// }//}//void RotateL(Node* parent)//{// Node* subR = parent->_right;// Node* subRL = subR->_left;// parent->_right = subRL;// if (subRL)// subRL->_parent = parent;// subR->_left = parent;// Node* ppNode = parent->_parent;// parent->_parent = subR;// if (parent == _root)// {// _root = subR;// _root->_parent = nullptr;// }// else// {// if (ppNode->_right == parent)// {// ppNode->_right = subR;// }// else// {// ppNode->_left = subR;// }// subR->_parent = ppNode;// }//}bool IsBalance(){if (_root->_col == RED){return false;}int refNum = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK)refNum++;cur = cur->_left;}return Check(_root,0, refNum);}void InOrder(){_InOrder(_root);cout << endl;}private:bool Check(Node* root,int blackNum,const int refNum){if (root == nullptr){if (blackNum != refNum){cout << "黑错" << endl;return false;}return true;}if (root->_col == RED && root->_parent->_col == RED){cout << "红红" << endl;return false;//连续红}if (root->_col == BLACK){blackNum++;}return Check(root->_left, blackNum, refNum) && Check(root->_right, blackNum, refNum);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}Node* _root = nullptr;//size_t _size;
};