ISP中拖影问题的处理
有时候会出现如下的阴影问题该如何处理呢?本文将提供几个思路。

1、降低曝光时间
如果曝光时间过大,会统计整个曝光时间内的图像信息,就会导致拖影的产生,这个时候可以考虑降低一下曝光时间。
2、时域降噪过大
只要明白时域降噪是什么,就能理解。
时域降噪基本原理:利用视频中相邻帧(多帧)的冗余信息,通过加权平均或运动补偿的方式降低噪声。时域噪声(如传感器随机噪声)在帧与帧之间是随机变化的,而静态场景内容是稳定的。对同一位置的像素点,若场景静止,多帧叠加会降低噪声(随机噪声相互抵消);若场景运动,叠加会导致运动物体模糊(拖影)。
解决思路:降低时域降噪,提高空域降噪。
3、HDR方式
DOL HDR模式也可能是导致拖影的一个原因,在解释完DOL HDR的运作方式便可以轻松理解。
DOL(Digital Overlap)是一种通过分时曝光实现HDR的技术。Sensor在同一帧周期内依次进行长曝光(Long Exposure)和短曝光(Short Exposure)。长曝光尚未完全读出时,短曝光已开始,两者存在时间间隔(Δt)。当拍摄运动物体时,长曝光和短曝光的两帧图像因Δt的存在,捕捉到的物体位置不同(例如:长曝光帧中物体在位置A,短曝光帧中物体已移动到位置B)。ISP将两帧融合后,同一物体的不同位置信息被合并,导致边缘模糊或重影。
那么如何解决呢?
可以用DCG HDR 代替 DOL HDR模式,那么DCG HDR流程是什么?
通过单次曝光+双增益(Dual Gain) 替代分时曝光,避免时间差(Δt)导致的运动伪影。因为只有一次曝光,所以不存在时间差。

实际应用中的取舍
-
选择DOL的场景:
需要极高动态范围(如夜景拍摄),且对运动拖影不敏感(如静态风光摄影)。 -
选择DCG的场景:
动态范围要求适中,但需避免运动伪影(如视频拍摄、运动物体抓拍)。
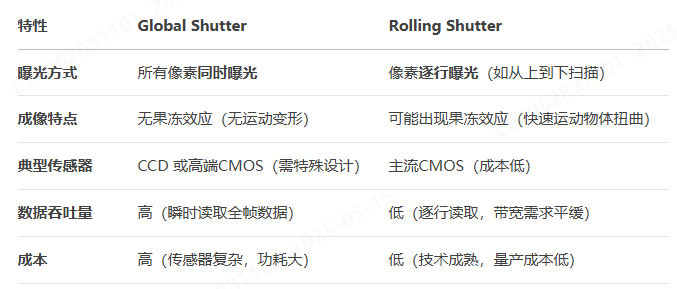
4、果冻效应
这个是和曝光模式有关系,感兴趣的可以自行了解。在下图中,左边是全局快门,右边的卷帘快门。