SLAM定位常用地图对比示例
| 序号 | 地图类型 | 概述 |
|---|---|---|
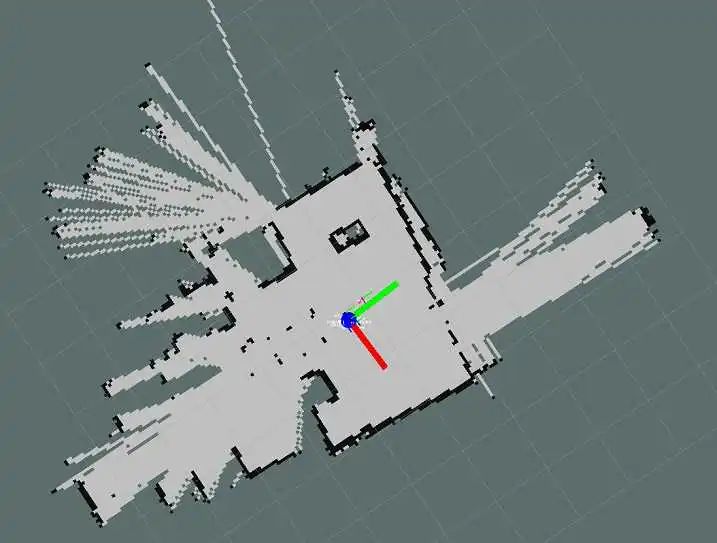
| 1 | 格栅地图 | 将现实环境栅格化,每一个栅格用 0 和 1 分别表示空闲和占据状态,初始化为未知状态 0.5 |
| 2 | 特征地图 | 以点、线、面等几何特征来描绘周围环境,将采集的信息进行筛选和提取得到关键几何特征 |
| 3 | 拓扑地图 | 将重要部分抽象为地图,使用简单的图形表示环境中的物体信息,相对关系表示为节点与连接线的拓扑图 |
| 4 | 点云地图 | 利用扫描到的离散点的集合,直观地描述周围环境地图的原始几何信息 |
| 5 | 语义地图 | 利用神经网络进行点云的语义分割,地图融合语义标签,强调地图各对象间的描述性 |
1. 格栅地图:因更新速度快,带有鲜明的颜色区分,多用在机器人的自主导航。
2. 特征地图:因占用空间小、计算量少,适用于走廊、办公室等相对结构化